Wifi-Controlled 4 Wheeled Robot
by AnupamK9 in Circuits > Arduino
503 Views, 3 Favorites, 0 Comments
Wifi-Controlled 4 Wheeled Robot

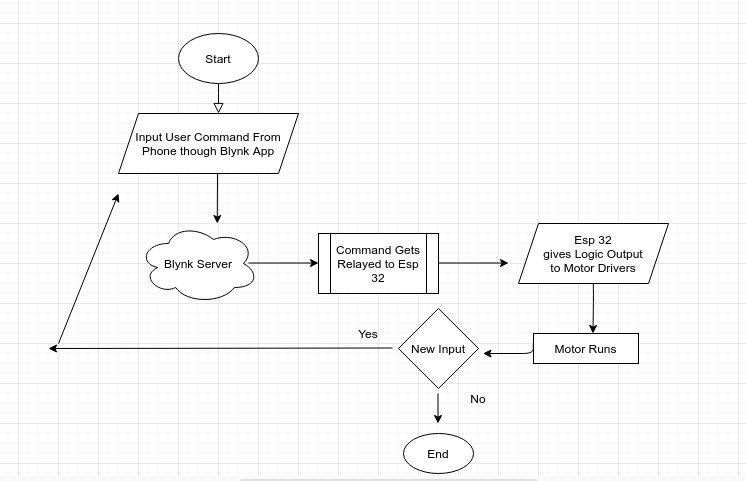
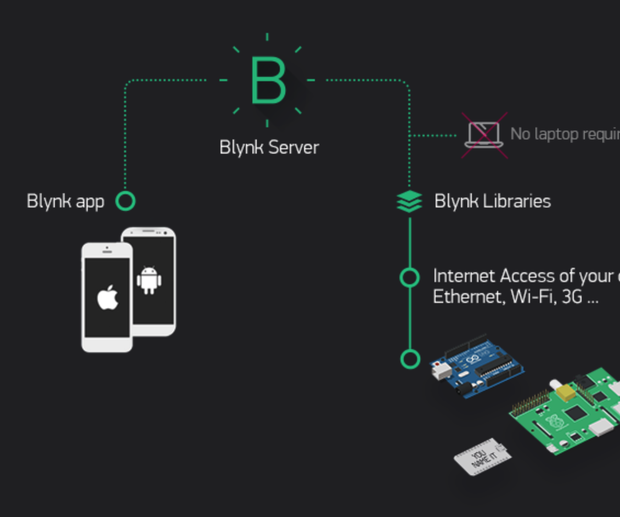
It is a Wifi-Controlled 4 Wheeled Robot which basically comprises of a ESP32 Dev Board as microcontroller responsible with communicating with Blynk Server for instructions and L298N as motor contoller to drive the motor in accordance to the user's command.
1. Initially, the Arduino IDE must be downloaded and installed from the website:
2. For programming ESP32 Dev Board with the Arduino IDE, please follow the instructions in the links below :
3. Download and Install Blynk App in your phone
Electronics Required




Hardware and Tools




2. Wheel (x4)
3. Soldering Wire and Soldering Iron
4. Matrix Board
5. Basic Wood Working Tools and Plyboard
Assembling the Circuit Board
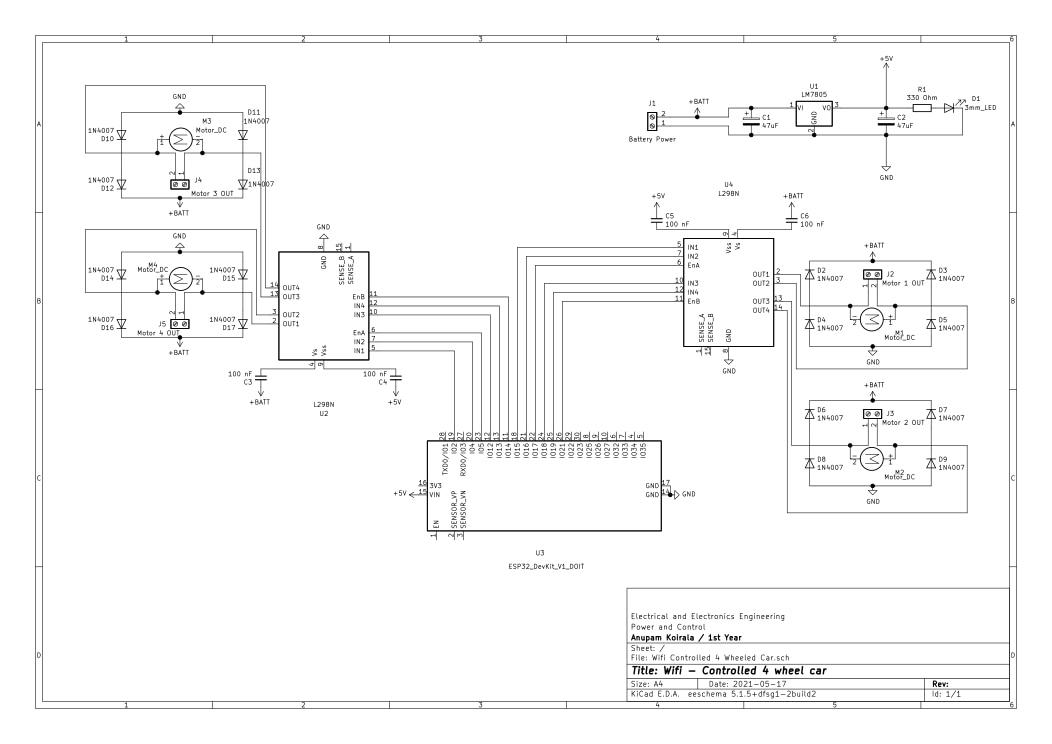
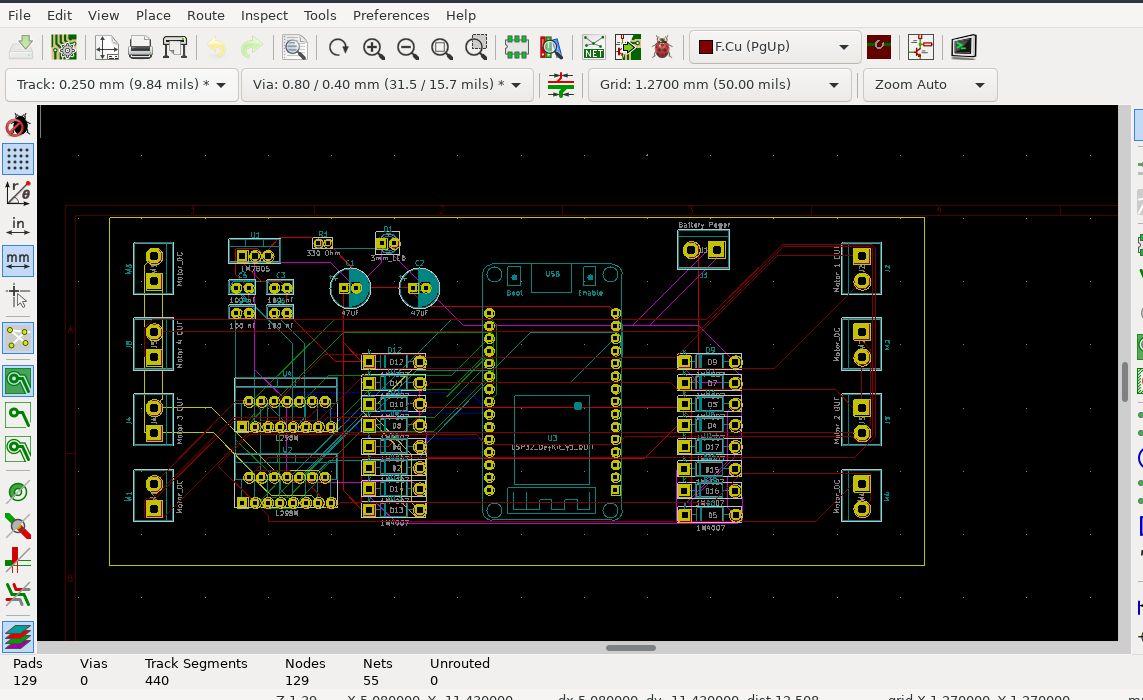
1. Use Soldering Iron and the Soldering Wire to fabricate the circuit as shown in the above schematic.
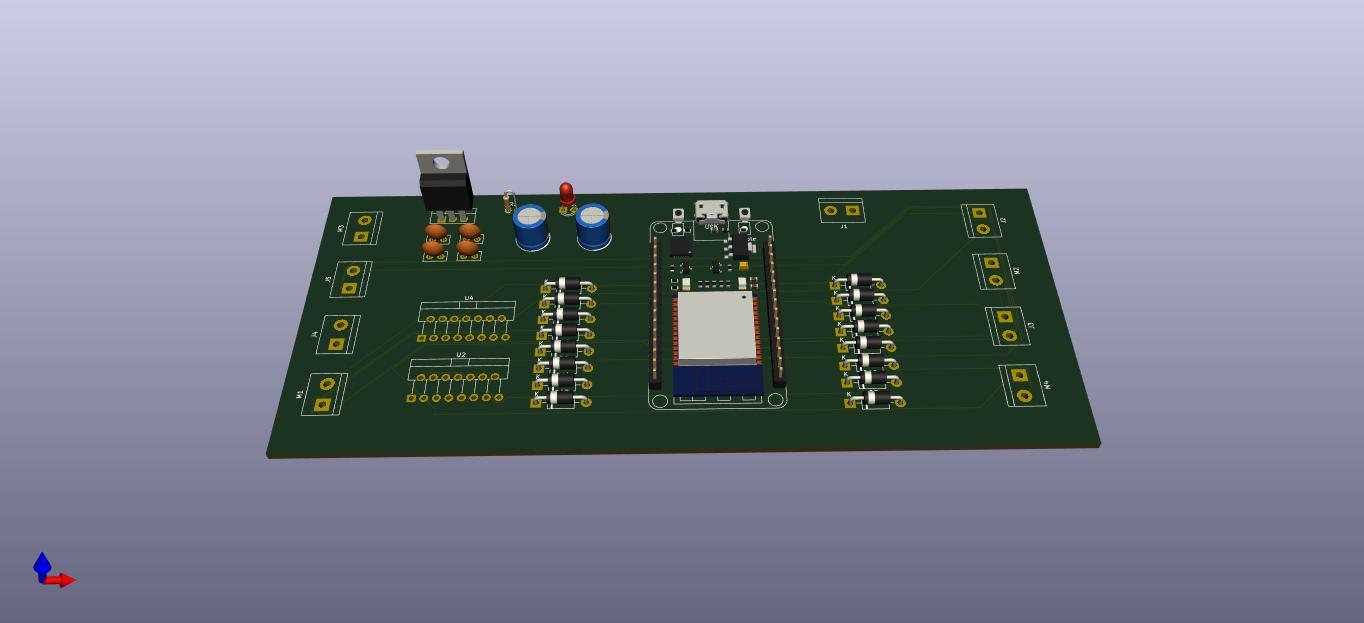
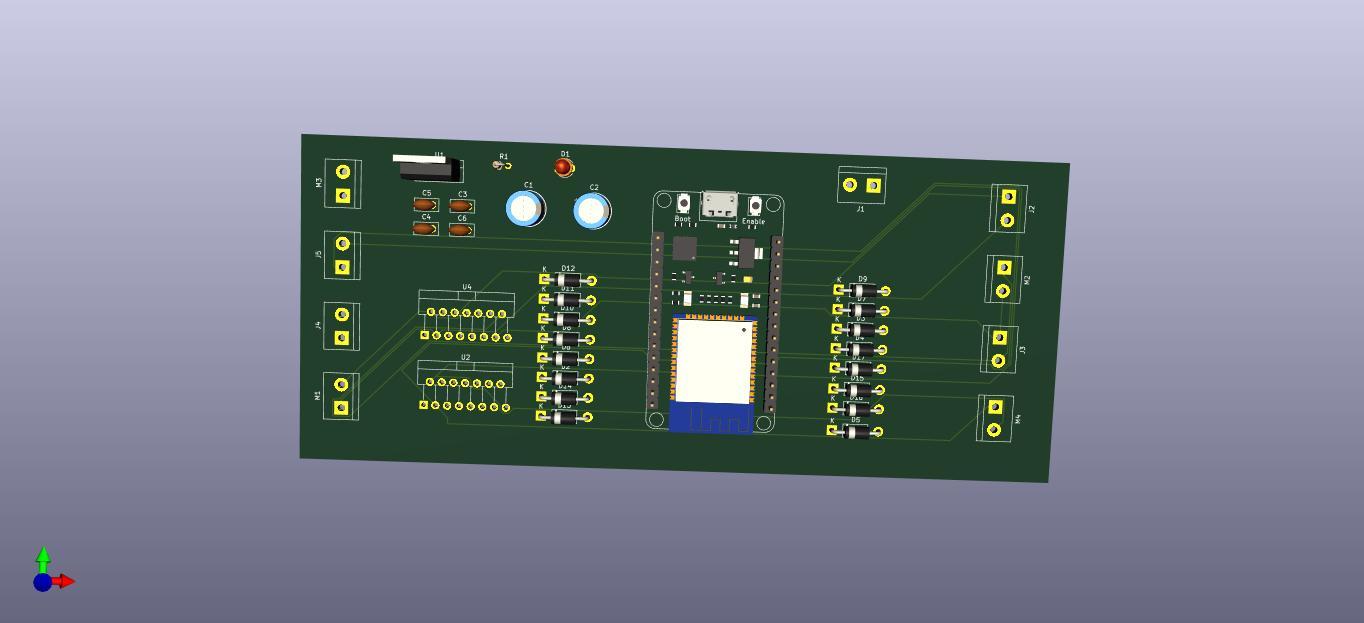
2. The completed circuit must look similar to the 3D Model of the PCB
3. The KiCad File can be Downloaded by clicking this Hyperlink
Programming

The following steps need to be taken:
1. Download the Blynk Mobile App
2. Look up the Blynk Website and figure out way to use Blynk with Esp 32
3. Set up a Project and include 2 Joystick widgets
4. Configure the Virtual Pins of Widgets and read their values in the program written in Arduino IDE
If you want to skip the process, download the program given in the link below.
Downloads
Assemble the Car
Cut a square out of plywood and add all the parts step by step.
Connect the battery and the robot is ready to run.