Using the PmodCON3 With ChipKIT Products
by joshwoldstad in Circuits > Microcontrollers
1190 Views, 17 Favorites, 0 Comments
Using the PmodCON3 With ChipKIT Products
The PmodCON3 is a useful tool that helps interface boards with Servo Motors. In this instructable, we're going to go over how the PmodCON3 works and give an example on how to get the Servo Motors, the PmodCON3, and the chipKIT WF32 working. This Instructable is going to focus
You can check out the video to see what the end result will be.
Looking at the PmodCON3
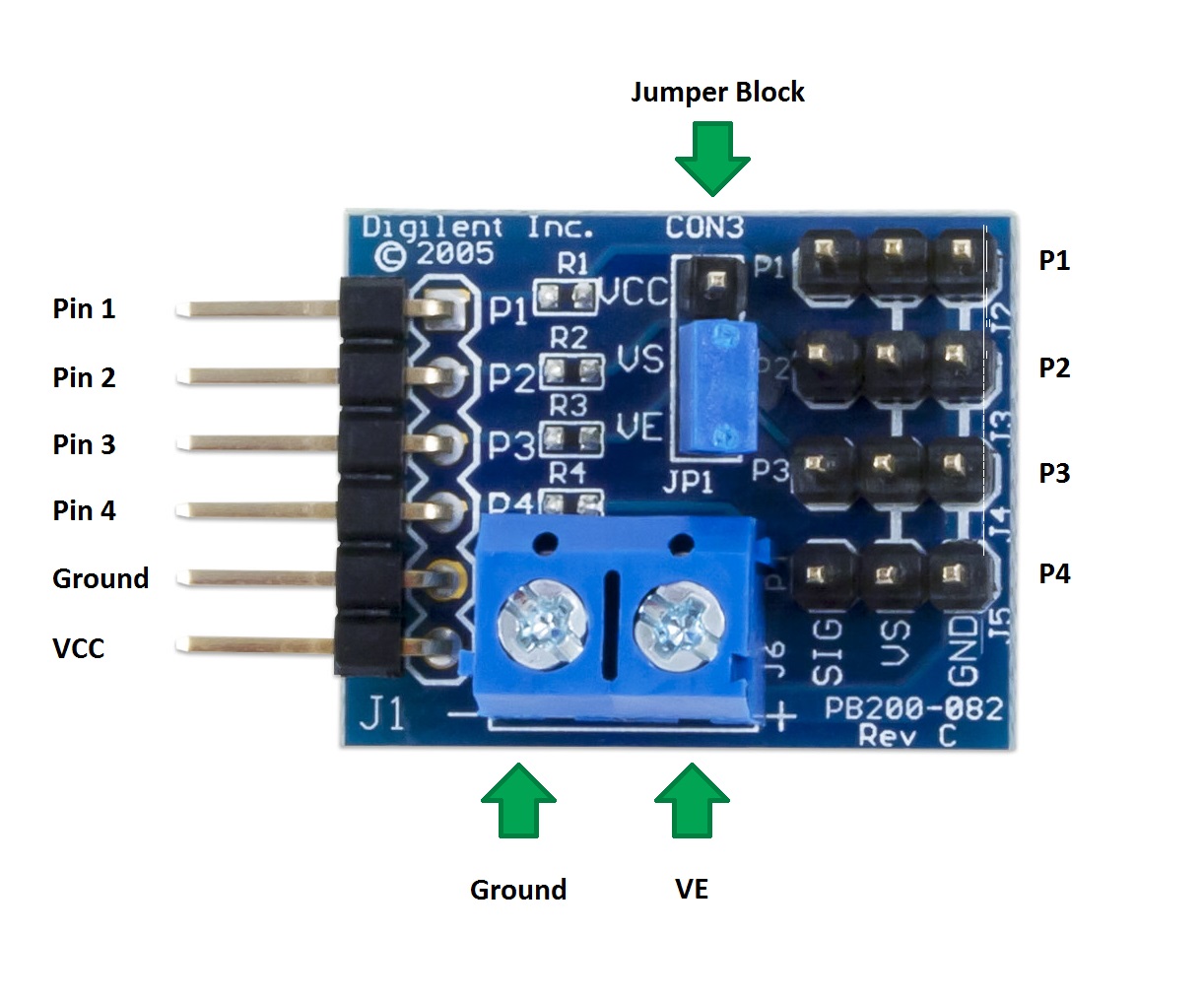
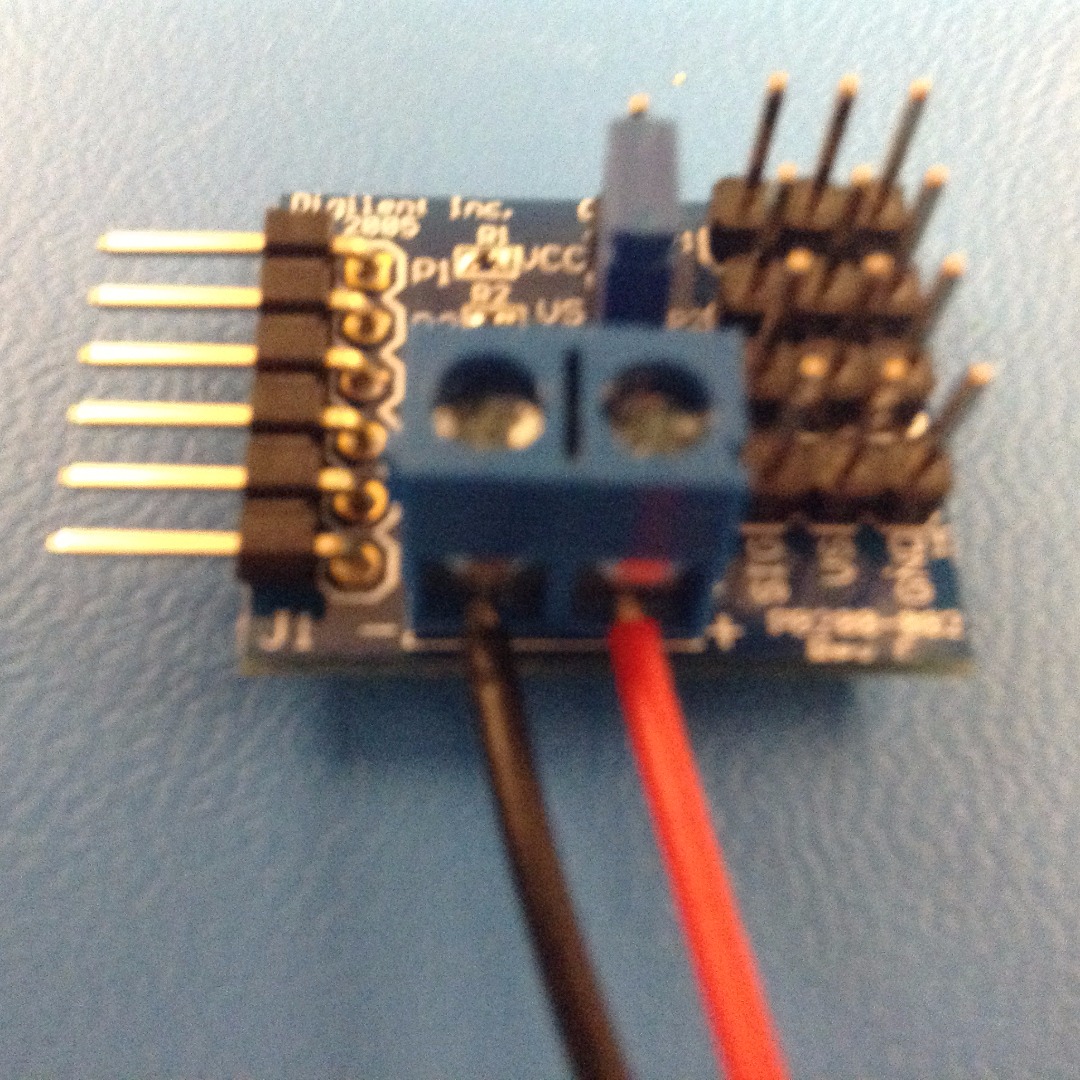
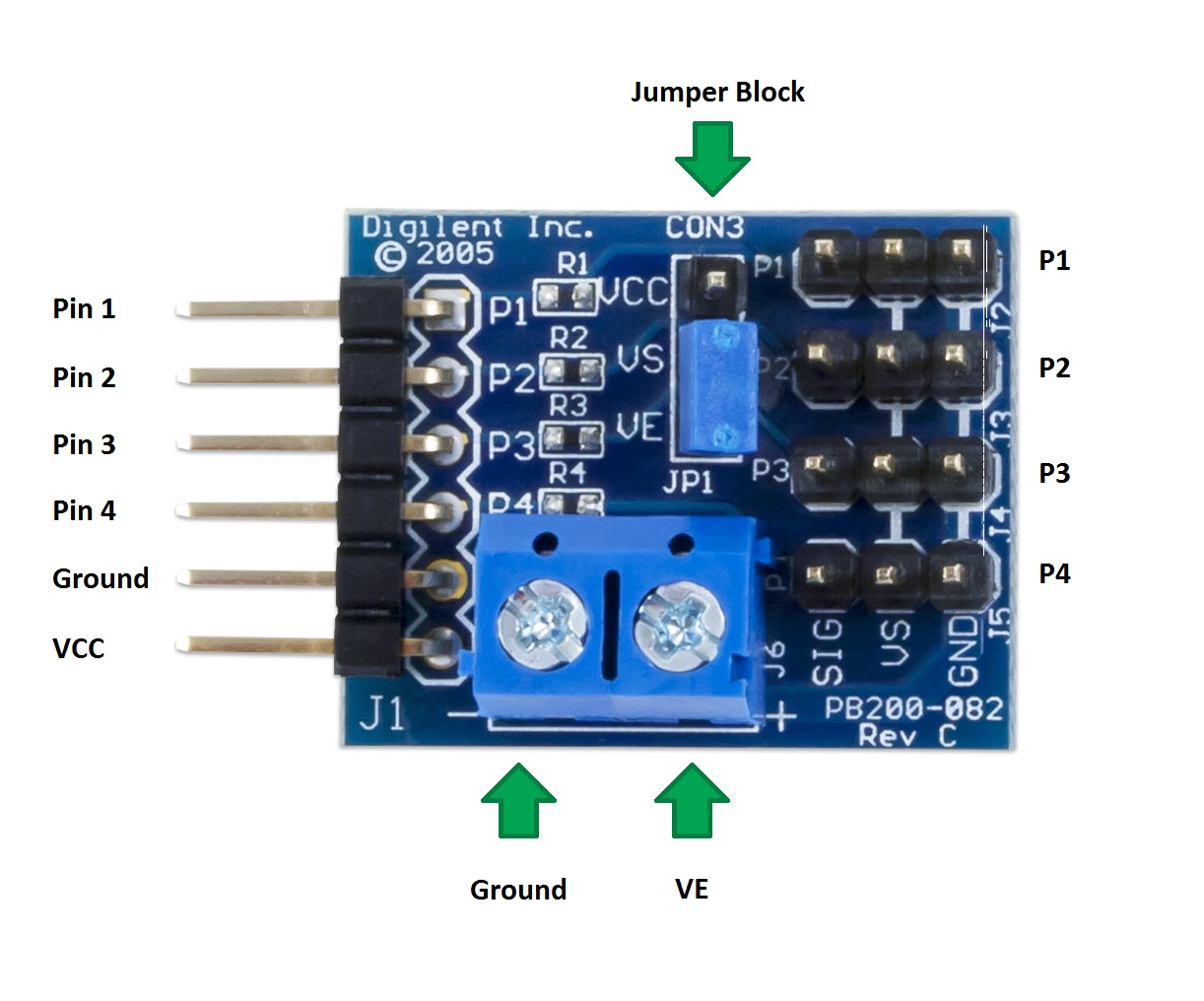
This is the PmodCON3. Nothing is too complicated here, but we're still going to go over everything.
If you look left side of the Pmod, you'll see Pin 1 through 4 and a Ground and VCC Pin. The Pins1-4 correpond directly the the P1 through on the right side of the Pmod. For example, if you have the Servo connector plugged into the P1, then you'll use Pin 1 as as the data signal. Below the Pins there are Ground and VCC. VCC is the power supply (you'll want 5.5 Volts), and Ground is the ground wire.
On the bottom side of the Pmod, there is the screw terminal with + and - terminals. The + is where the power input goes, and - is ground.
If you want to change to use the screw terminal power, you put the jumper block on the VS-VE jumpers, and if you want to use the Pins for power, move the jumper block to the VCC-VS jumpers.
That's everything in the PmodCON3, now we're going to set-up the project!
Attaching Terminal Wires to the PmodCON3
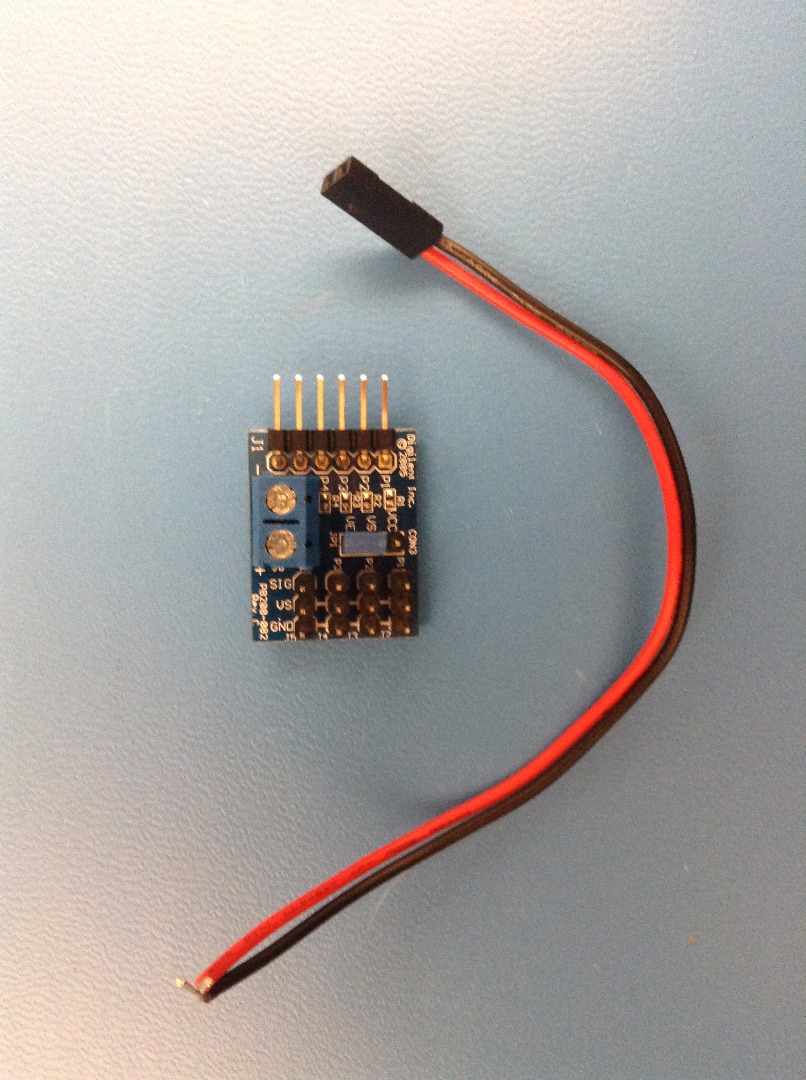
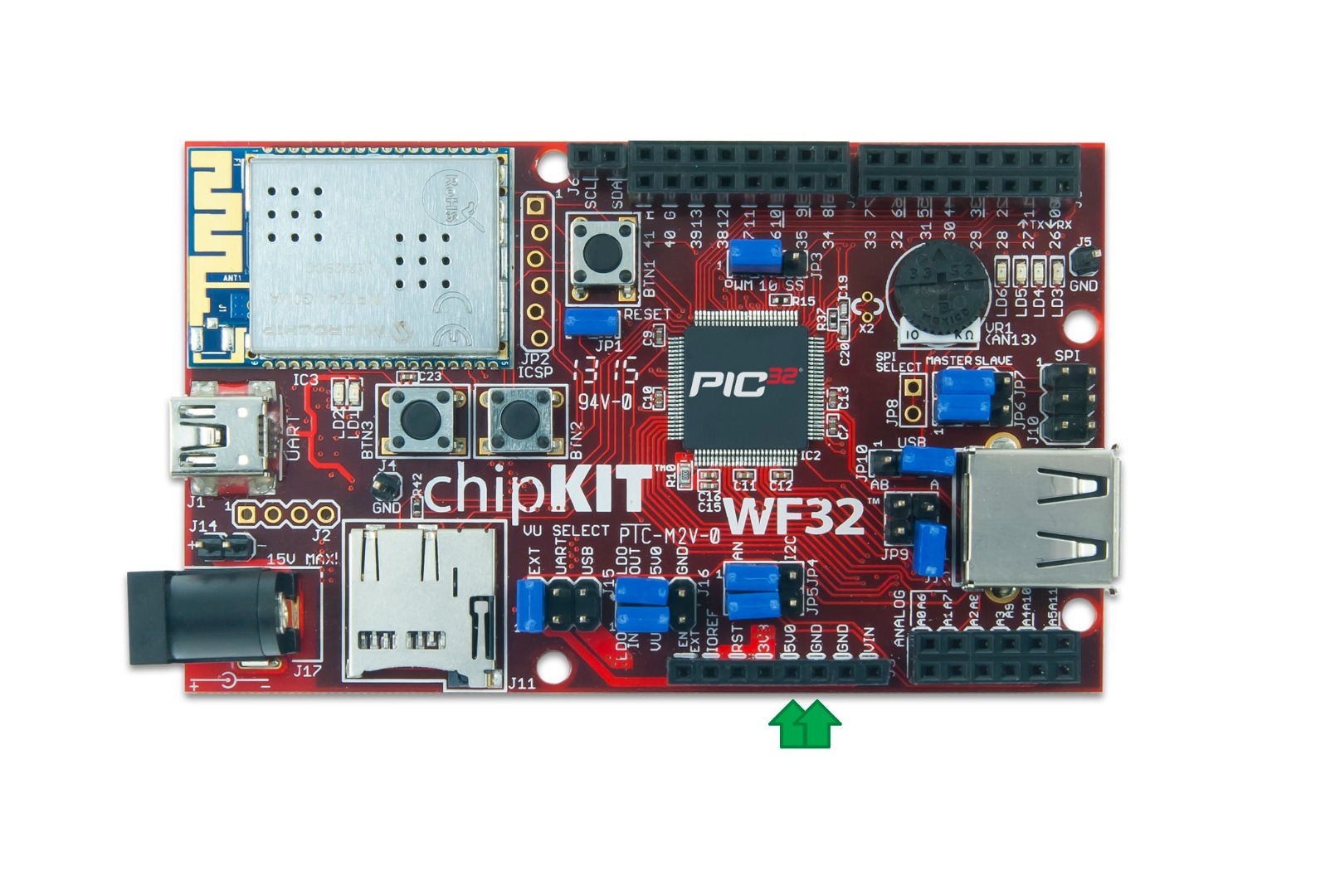
The PmodCON3 has a power terminal port, this means that we can power the PmodCON3 and all the servo motors that are attached to the PmodCON3. You can check out the third picture to see where you should attach the wires to the chipKIT WF32.
IMPORTANT: Put the red wire in the 5.5V pin and the black wire in the GND pin. Switching those around will be bad.
Data Pins
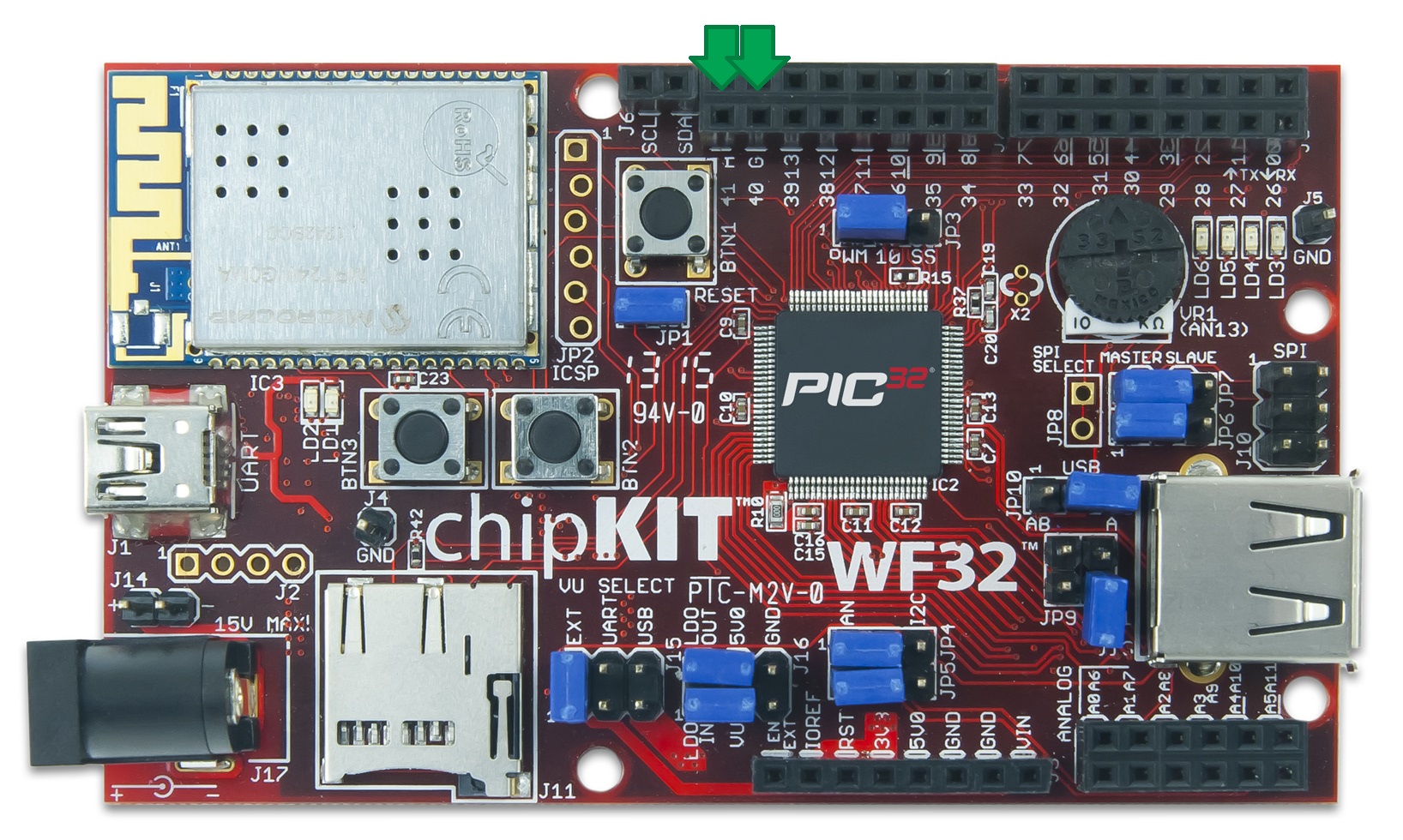
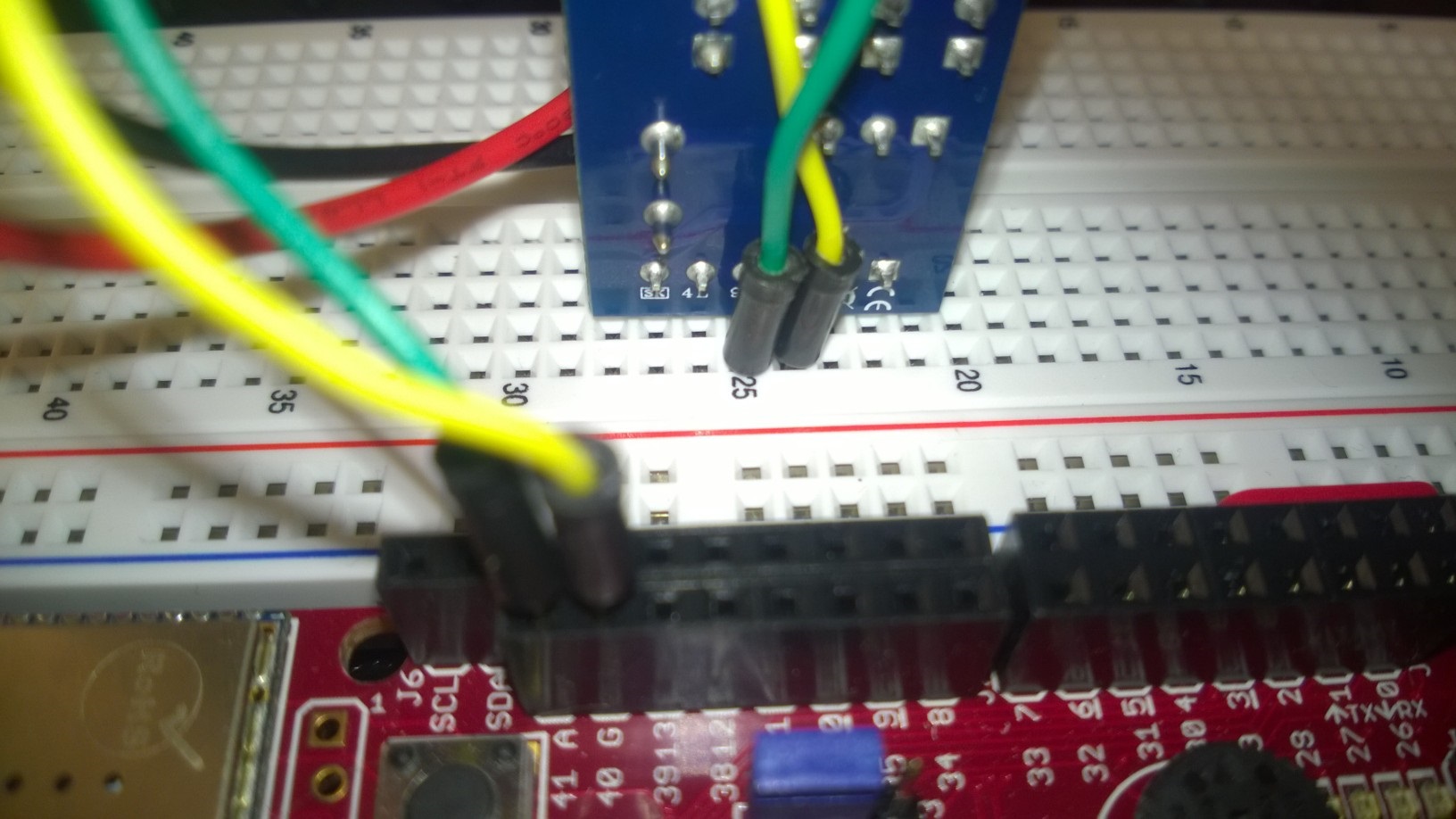
The pins 40 and 41 are what we are going to use to send signals to the PmodCON3 and the servo motors. The amount of pins we use are related to how many servo motors we have (1 pin per motor).
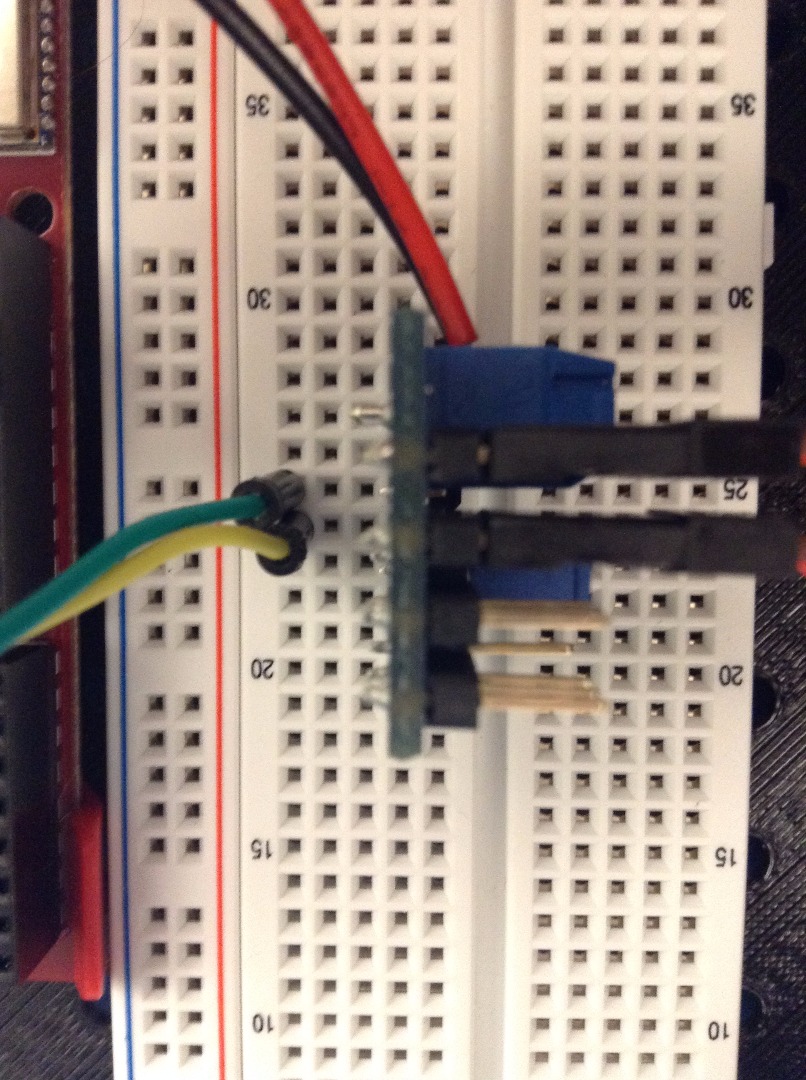
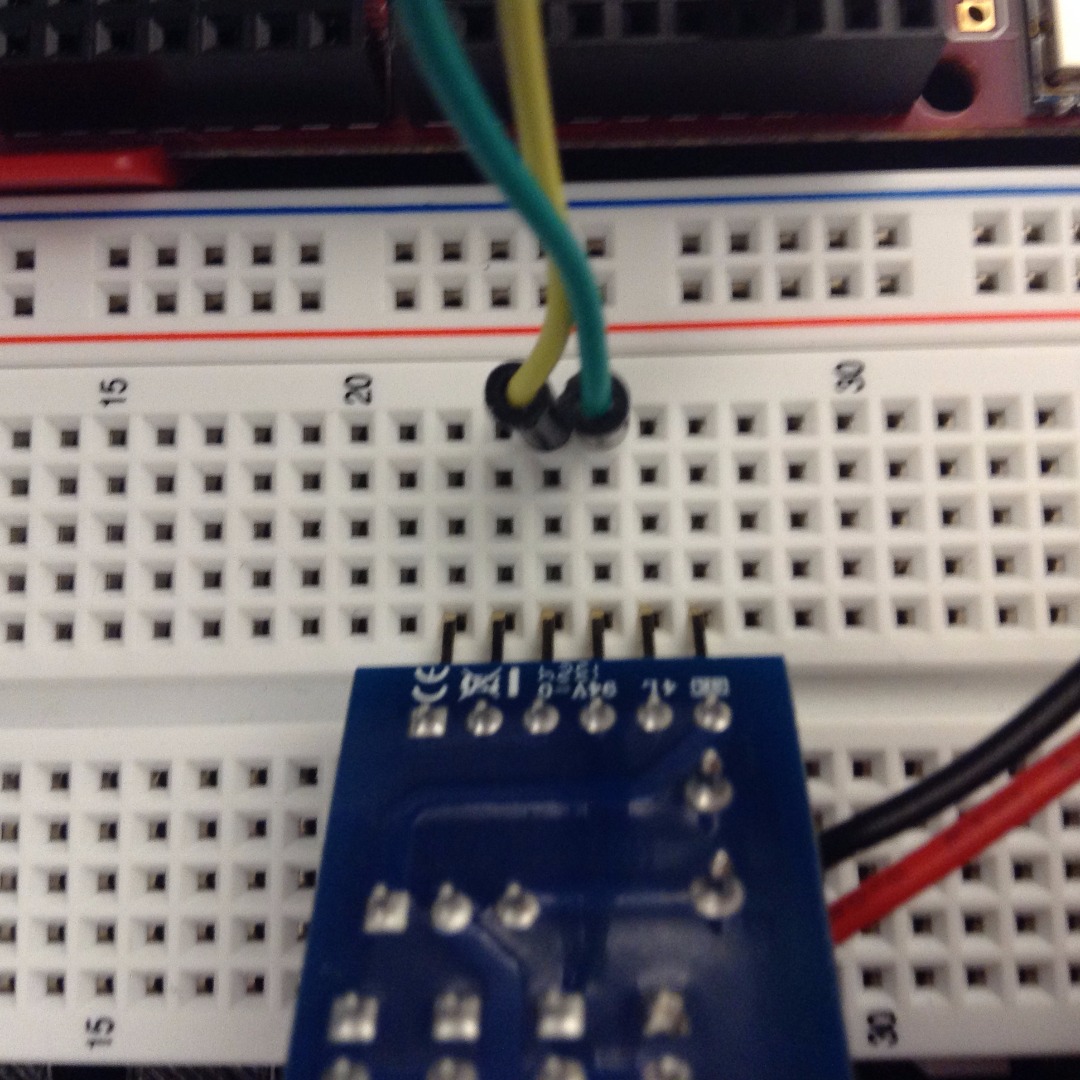
In pictures 2,3, and 4 you can see that the two pins are connected the breadboard, and are in the same row as Pin 3 and Pin 4 on the PmodCON3. The data signals will be sent to those to pins, so plug the servo motors in P3 and P4 (otherwise they won't recieve any data).
Uploading Sample Code
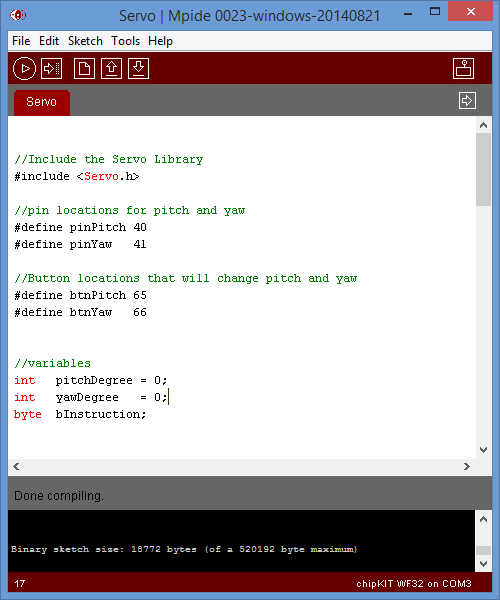
Upload the code in this step to your WF32 using MPIDE.
If you're not sure about uploading code with MPIDE, check out this Instructable!
Downloads
Finishing Everything Up!
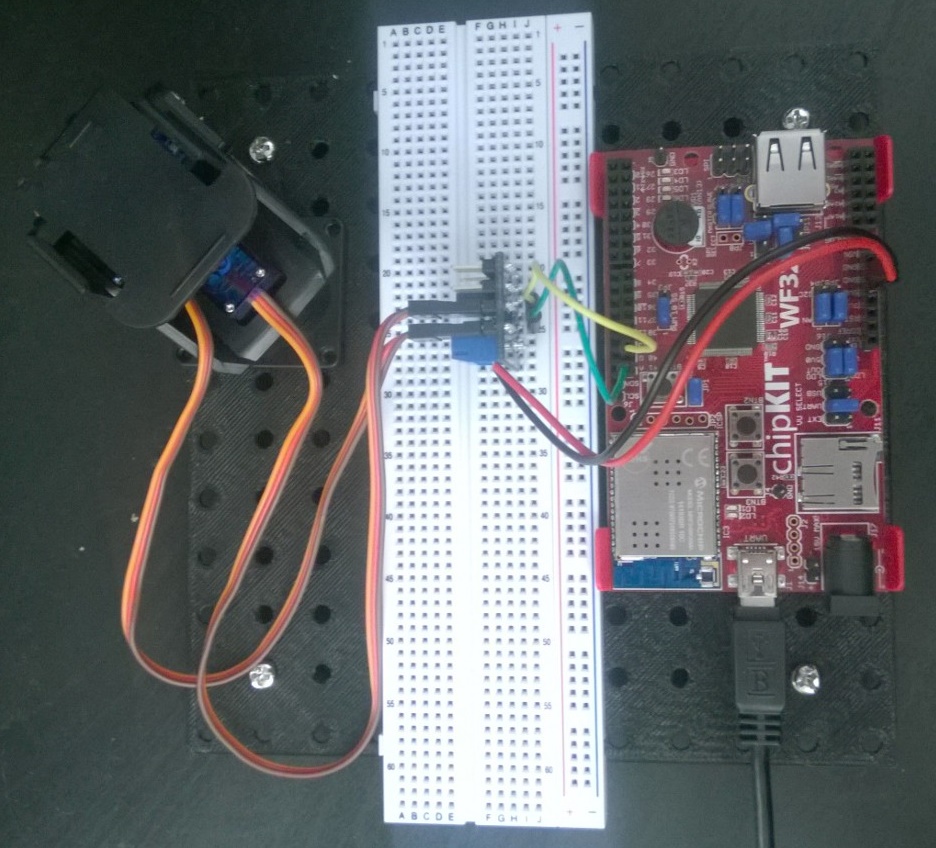
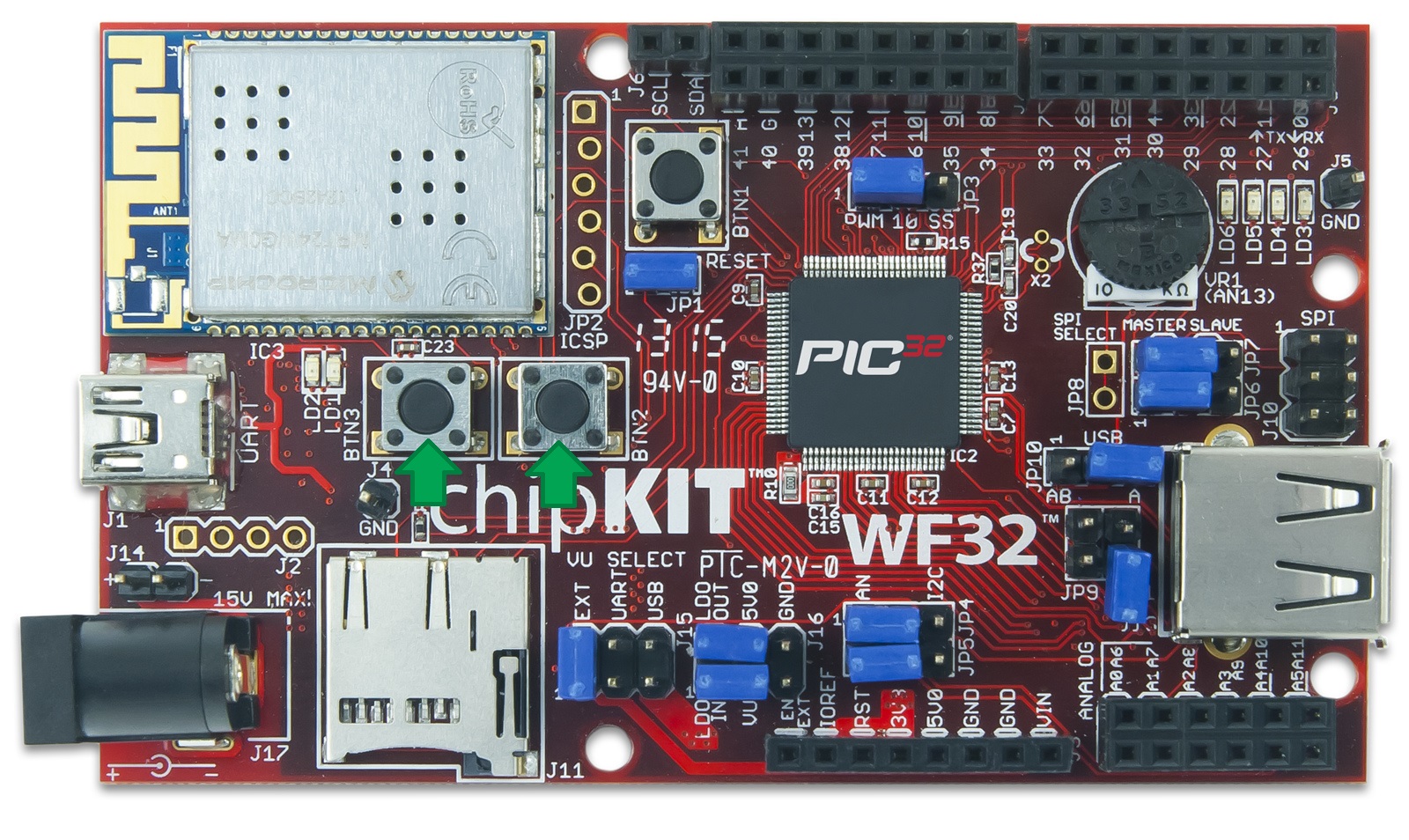
At this point everything should be all ready to go! It should look more or less like the picture shown. The two buttons on the board will control the servo motors!