Smart Railway Sistem
Description
The Smart Railway System is a fully customizable, 3D-printed, and eco-friendly railway network designed to help students learn coding, 3D modeling, and 3D printing in a fun and engaging environment. Made from biodegradable PLA, the system combines accessible electronics and open-source software to give students hands-on experience in building and programming their very own smart railway. Perfect for educational settings, this system allows users to design, program, and operate a dynamic railway network while learning core principles of automation, engineering, and technology.
Premise
As a child, I spent a lot of time playing with toy trains. While this helped foster creativity and spatial imagination, my project aims to take my childhood passion to the next level. I seek to create an open-source, eco-friendly, fully programmable railway system that students can use to learn 3D modeling, coding, and 3D printing.
Supplies
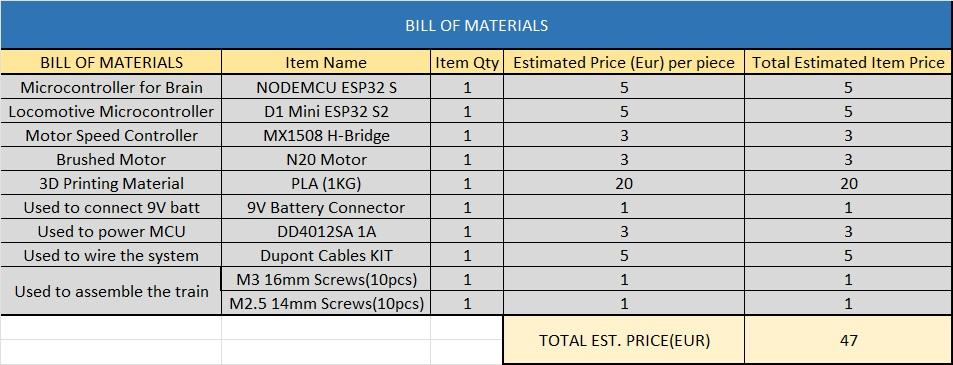
I used this tools
- Bambulab P1S for 3D printing
- 200W soldering hammer
- Soldering wire
- 2 USB-C cables
- Cutting pliers
Print the Train
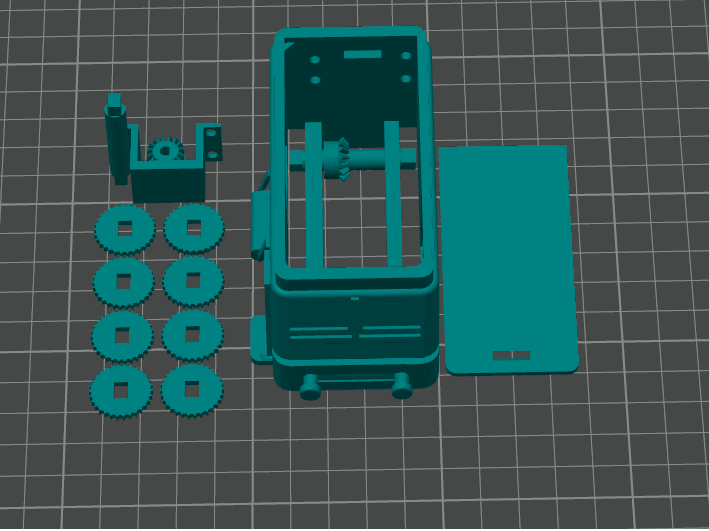
I recommend using a high resolution, specifically a 0.10mm layer height, for the train, as this layer height provides good tolerances for the shaft with the bevel gear. Additionally, use tree supports for optimal printing results.
After printing, use the pliers to remove the supports carefully.
Downloads
Wire the Locomotive
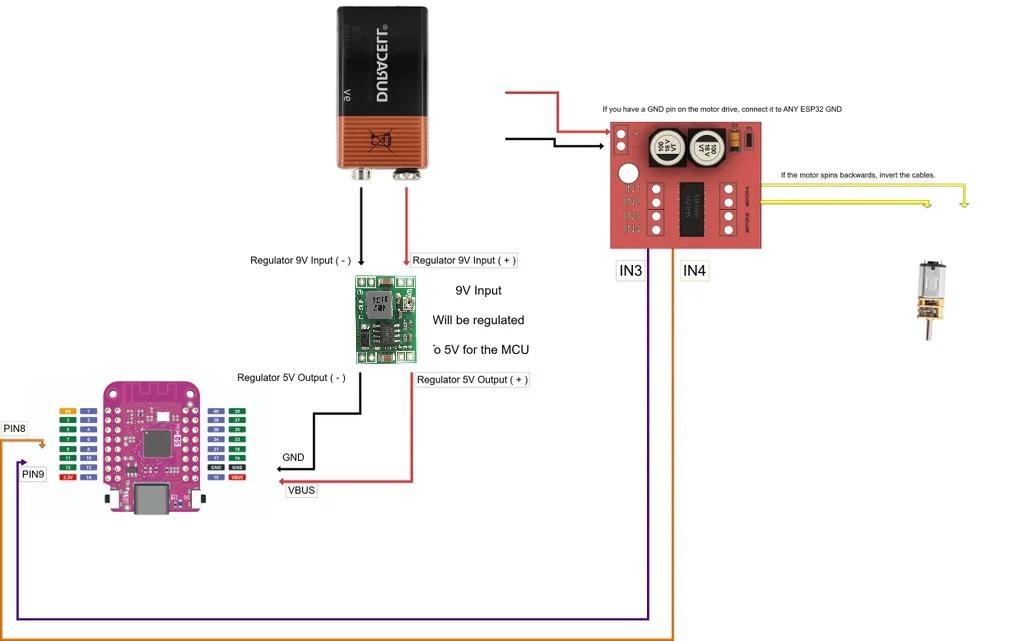
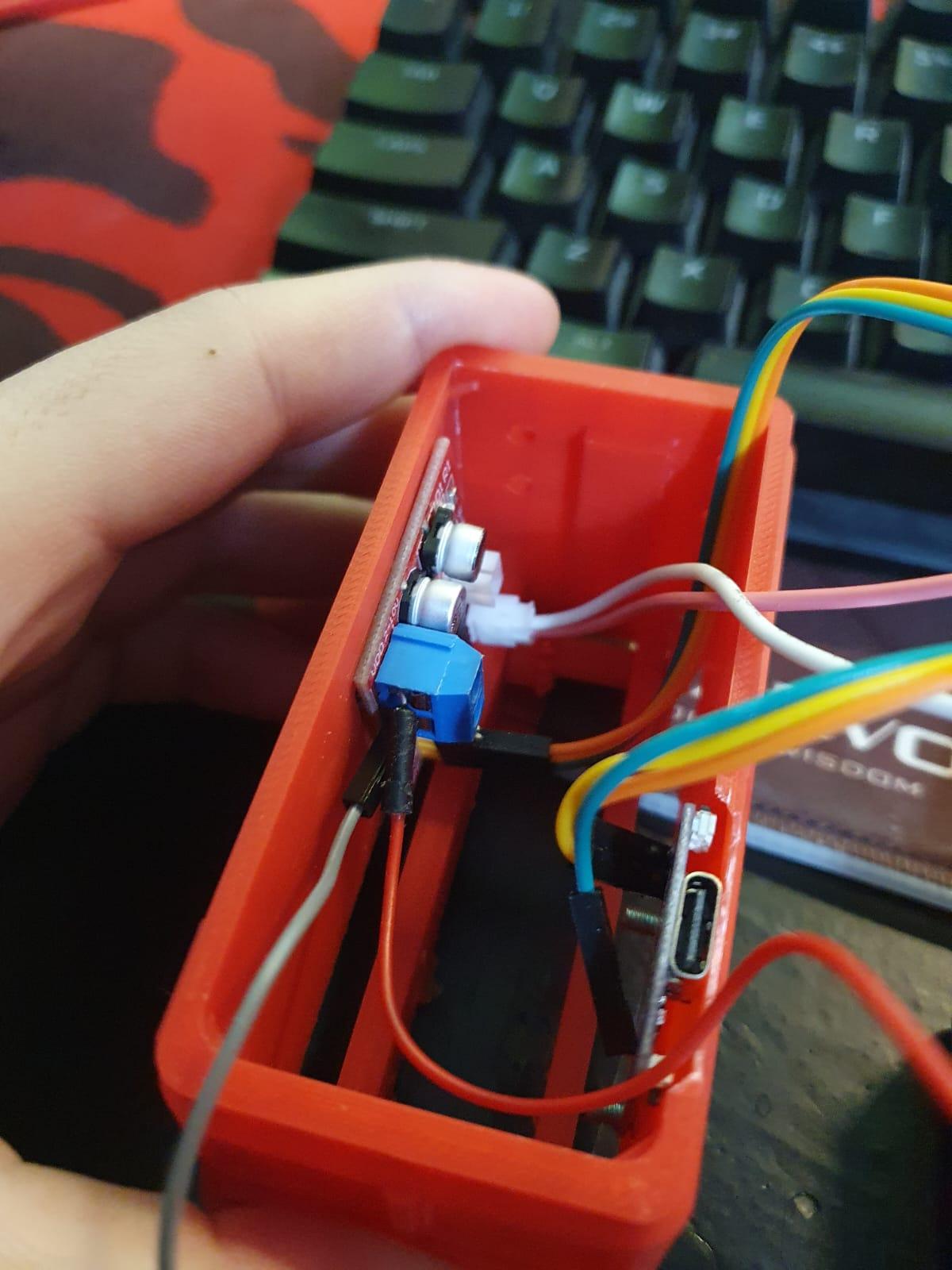
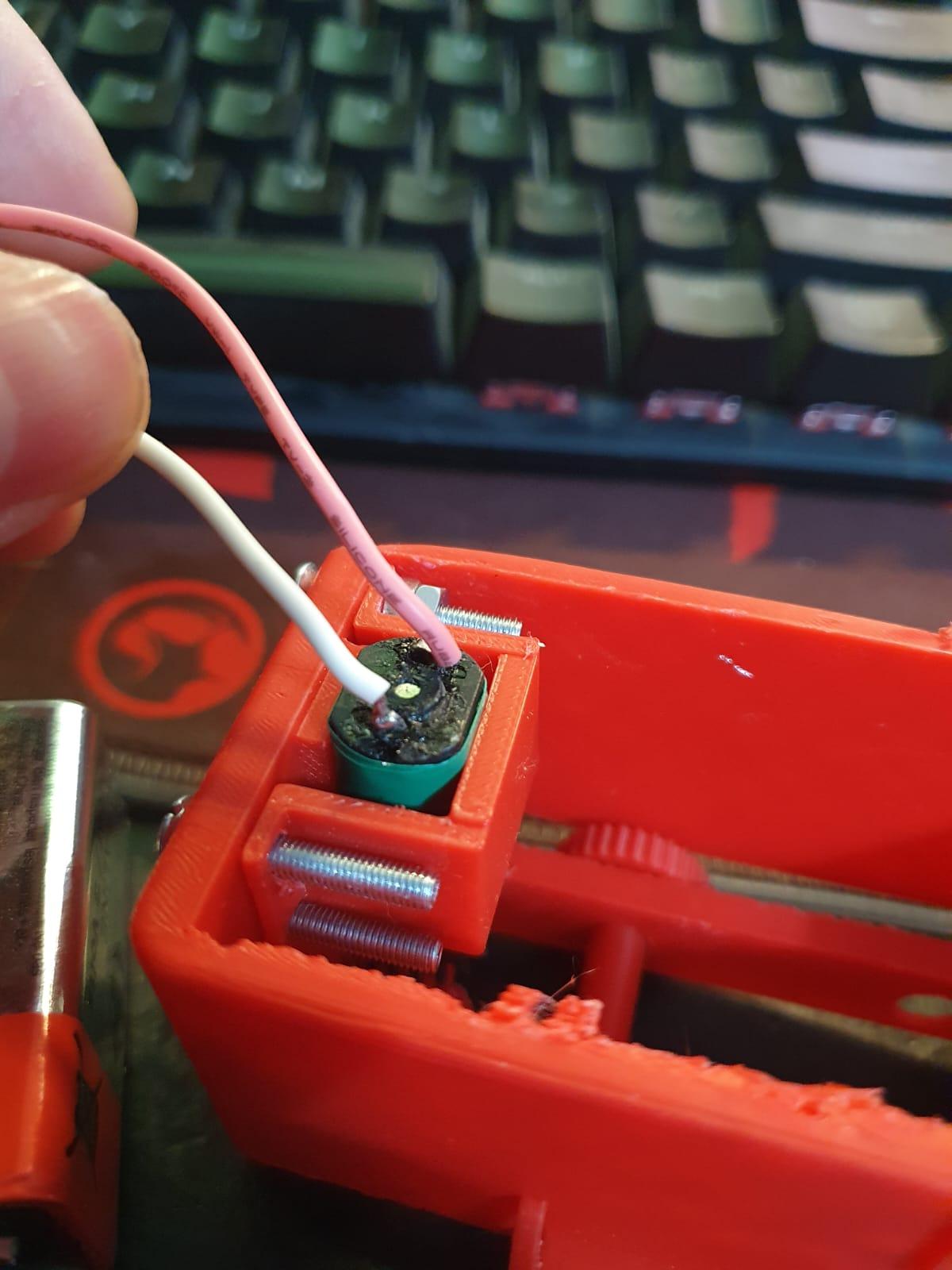
Wire the components as shown in the picture.
After wiring, place the components inside the train and secure them using screws.
Install and Setup IDE
Download the ARDUINO IDE
Add Board URL:
- Go to File > Preferences.
- In the "Additional Board Manager URLs" field, add the following URL:
Open Boards Manager:
- Go to Tools > Board > Boards Manager.
Install ESP32:
- In the Boards Manager, search for ESP32.
- Click on Install next to the "esp32 by Espressif Systems" entry
Upload Train Code ( ESP32 S2)
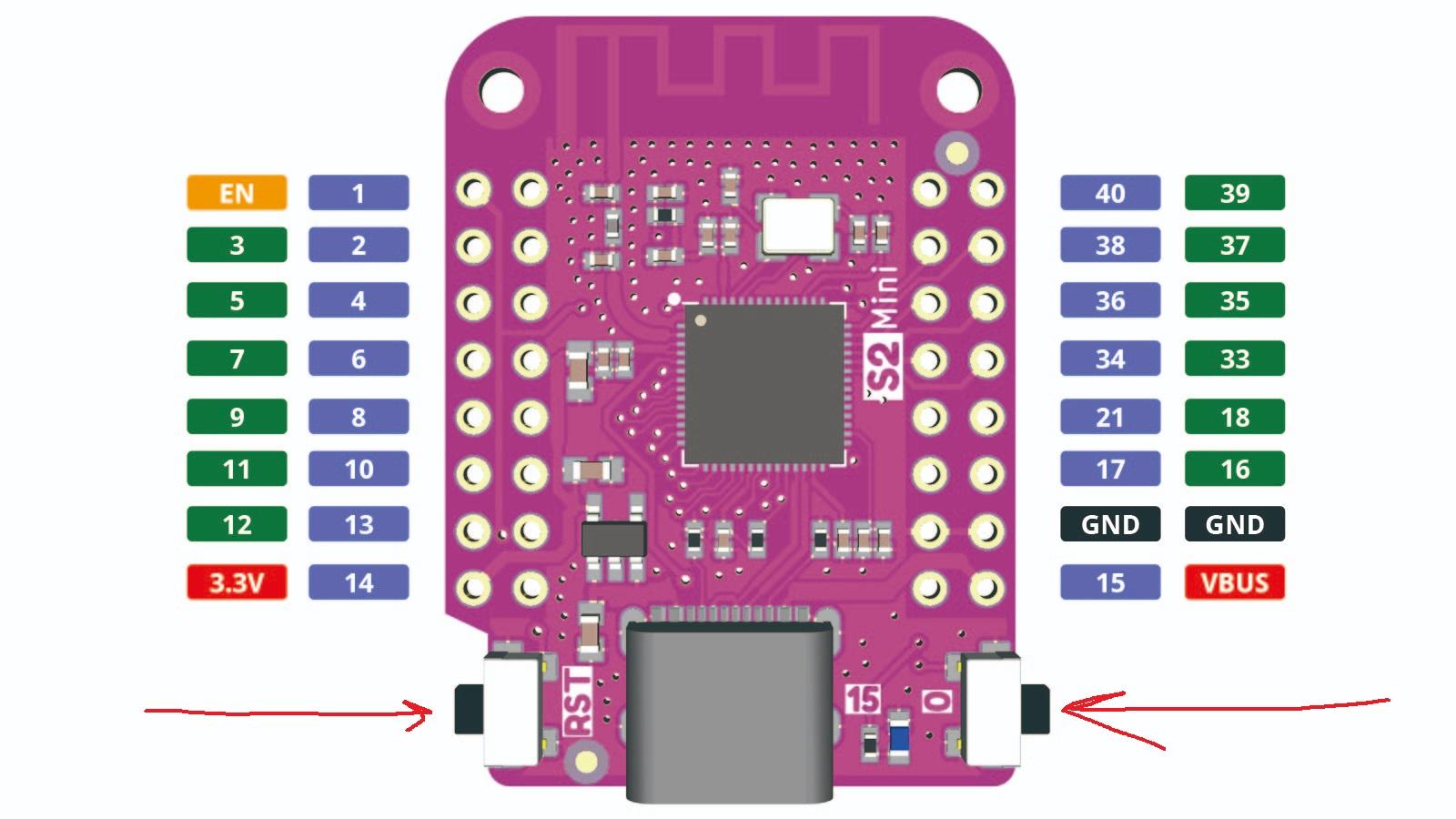
Press the O and Reset buttons simultaneously.
The board COM should apper after you release the buttons.
If not, install the CP201x drivers and try again.
Select the COM of the Board and Name (ESP32S2 Dev Module)
Upload Station Code (ESP32)
Upload the code and as the dots flash on the screen, press the BOOT Button.
Testing
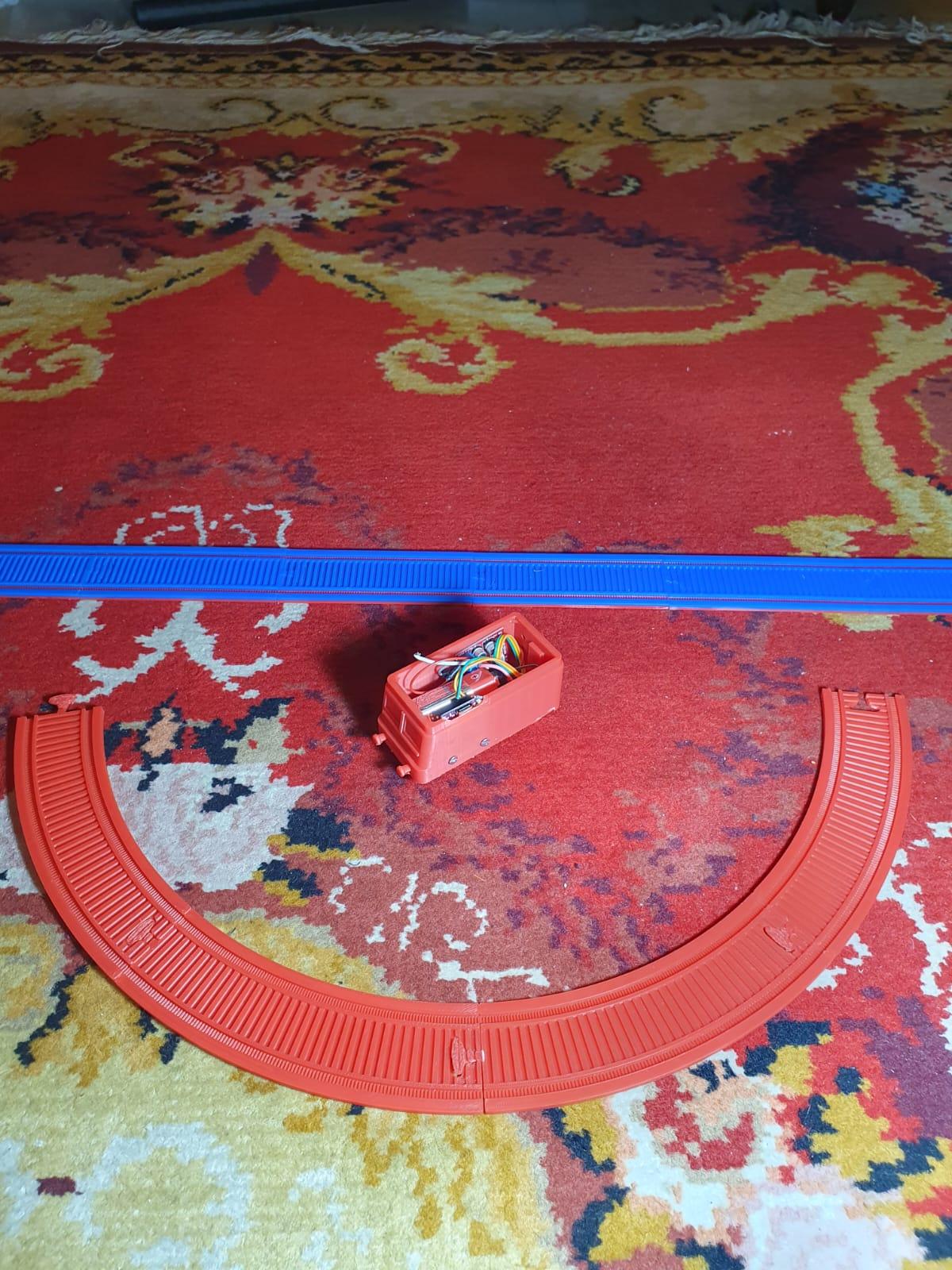
Print the Rail( to Your Liking )
Considering a 90 deg curve has 4 long curves and 1 short curve, print as many straight and curved lines as you want.
Customize
The provided file are there to spark you creativity.
What will you build next?