Servo 360 Rotation Mod (Parallax)
by biomech75 in Circuits > Microcontrollers
75771 Views, 78 Favorites, 0 Comments
Servo 360 Rotation Mod (Parallax)

In this instructurable I will expalin and show you how to make a Parallax servo rotate 360º. And againI have search the internet to see tutorials clear enough to make this posible with no luck. Don't get me wrong they are some how good but not clear. This mod will help you to use the mod servo for robots that need a fully 360º rotation servo. Also some of the pictures were taken from other instructurables and google to help new users understand this instructurable. This mod is useful for your robotics needs.
Enjoy ;)
Enjoy ;)
Materials

Parallax servo
Cutting pliers
Scewdriver
2X 220Omh resistors
Soldering iron
Desoldering pump.
Soldering iron.
Step 1
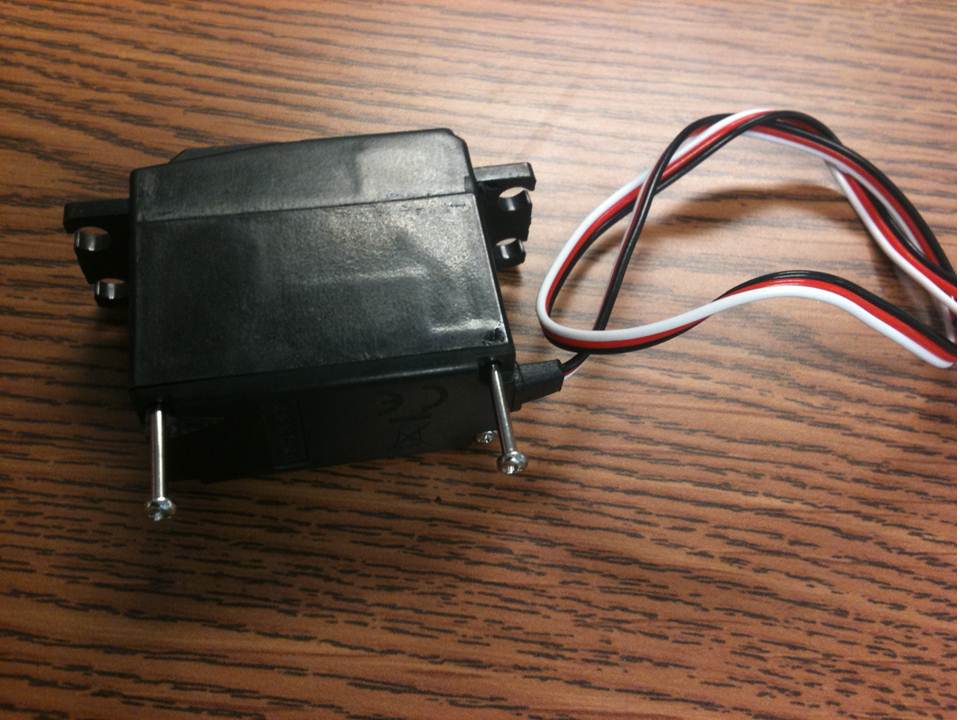
1. Remove the control horn attached to the top of the servo.
2. Remove the four screws on the bottom of the servo and take off the bottom plate.
2. Remove the four screws on the bottom of the servo and take off the bottom plate.
Step 2
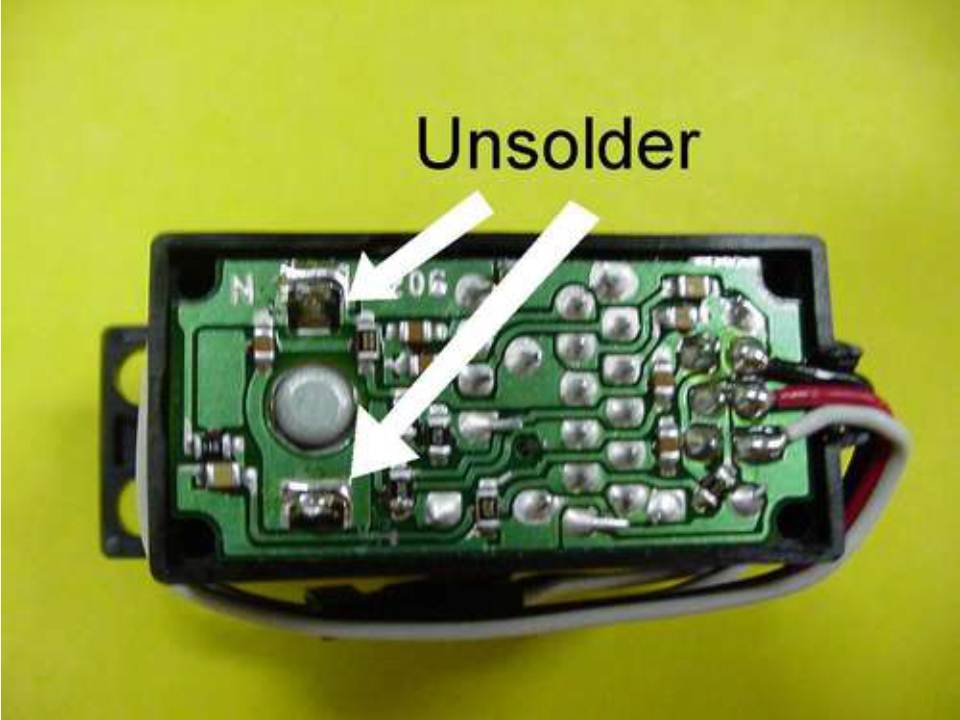

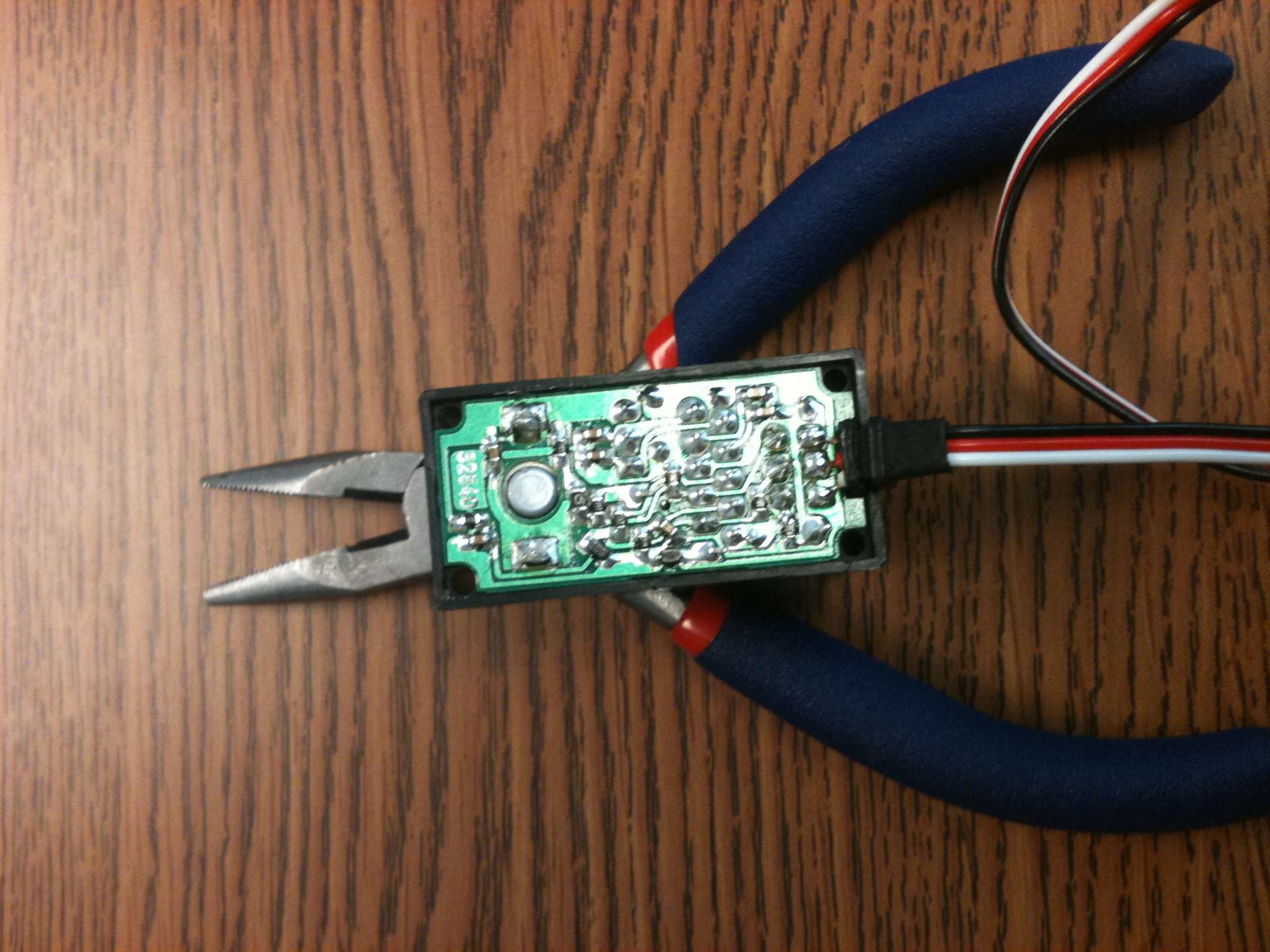
1. Unsolder the 2 connections you see in the picture. This will help to remove the PC board, without the motor.(Picture 1)
2. With a small screwdriver, carefully pry out the PC board motor control unit from the plastic case. It will be tight so go slowly. (Picture 2)
2. With a small screwdriver, carefully pry out the PC board motor control unit from the plastic case. It will be tight so go slowly. (Picture 2)
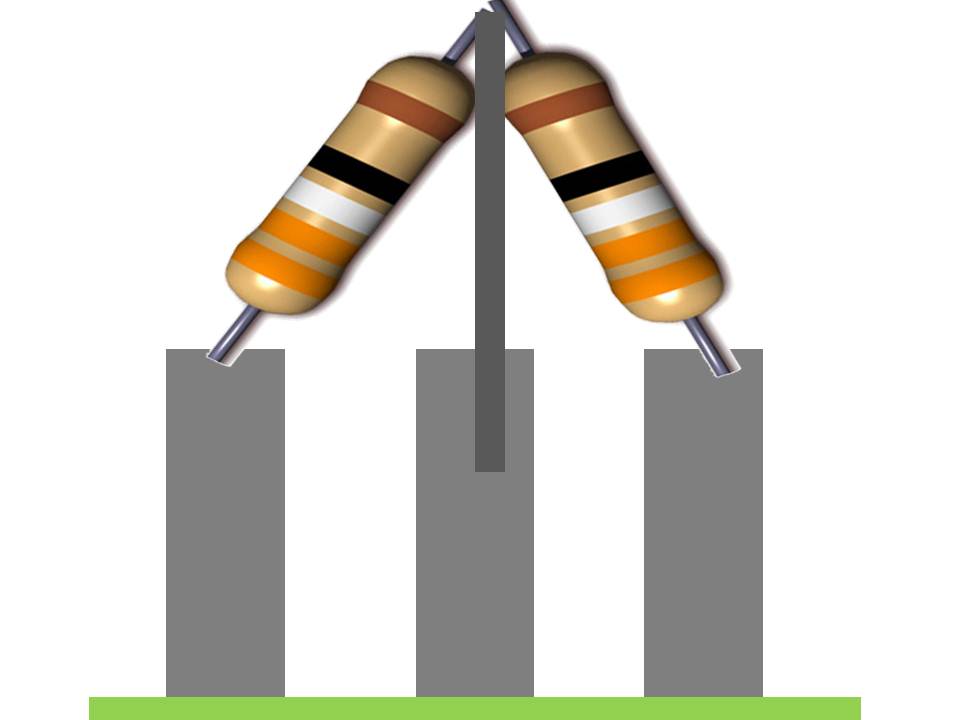
Step 3

1. I have soldered together the 2 220Ohm resistors. (Picture 1)
Put them together like the picture.
The two resistors will replace the potentiometer for the continuos rotation
Put them together like the picture.
The two resistors will replace the potentiometer for the continuos rotation
Step 4



1. Remove the potentiometer by cutting it from the PC board.
Step 4
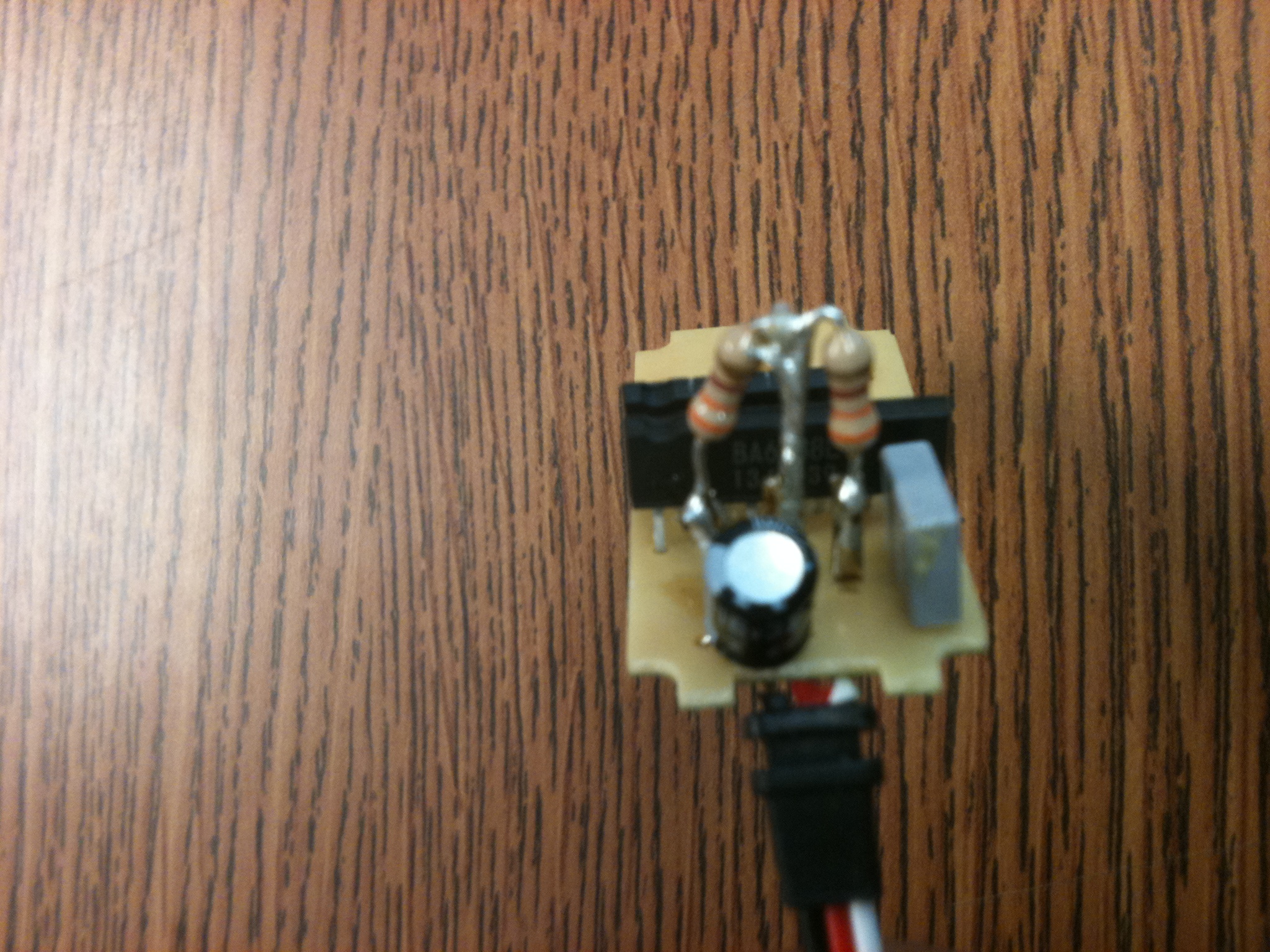
1. Attach the resistors where the potentiometer was installed before.
In the Drawing you will see the resistors attached together were the potentiometer was installed.
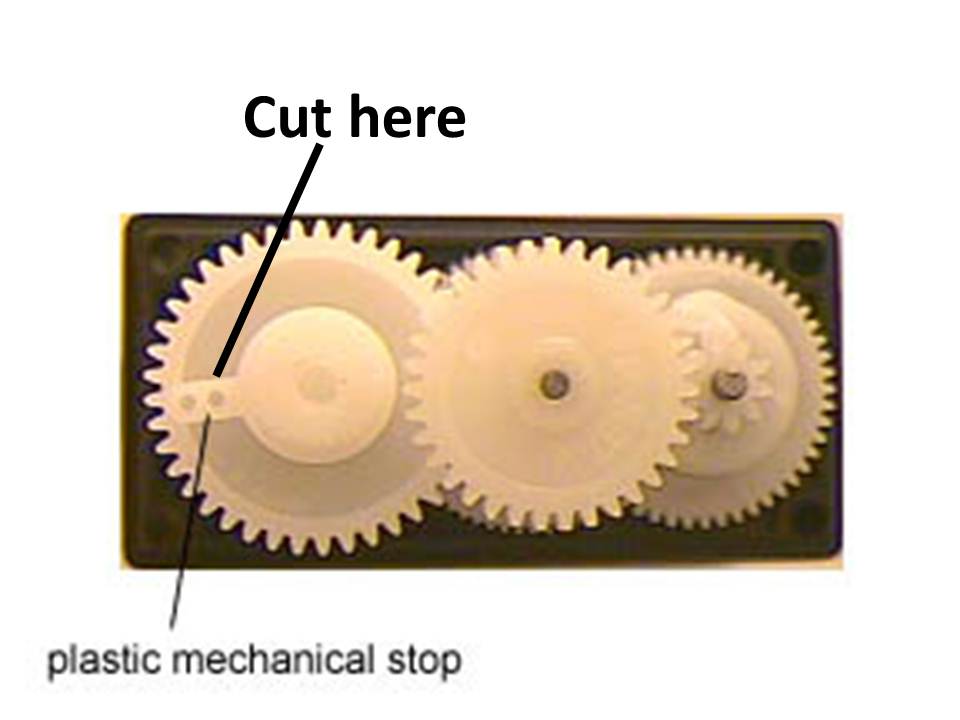
2. Then cut the plastic mechanical stop.
The resistors will help the servo last longer. Also they are in place of the potentiometer so you can control the servo using the digital pins on the Arduino.
In the Drawing you will see the resistors attached together were the potentiometer was installed.
2. Then cut the plastic mechanical stop.
The resistors will help the servo last longer. Also they are in place of the potentiometer so you can control the servo using the digital pins on the Arduino.
Step 5


Assemble everything back again
Try this code to try the 360º rotation:
// Sweep
// by BARRAGAN <http://barraganstudio.com>
// This example code is in the public domain.
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// a maximum of eight servo objects can be created
int pos = 0; // variable to store the servo position
void setup()
{
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop()
{
for(pos = 0; pos < 180; pos += 1) // goes from 0 degrees to 180 degrees
{ // in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for(pos = 180; pos>=1; pos-=1) // goes from 180 degrees to 0 degrees
{
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
Try this code to try the 360º rotation:
// Sweep
// by BARRAGAN <http://barraganstudio.com>
// This example code is in the public domain.
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// a maximum of eight servo objects can be created
int pos = 0; // variable to store the servo position
void setup()
{
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop()
{
for(pos = 0; pos < 180; pos += 1) // goes from 0 degrees to 180 degrees
{ // in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for(pos = 180; pos>=1; pos-=1) // goes from 180 degrees to 0 degrees
{
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
Trubleshooting

1. When I took apart the servo all the gears were loose how do I put them in the right order?
A. Look at the picture to see the gears in place.
A. Look at the picture to see the gears in place.