Puppy Toy That Reacts to Your Call
by Lynn_Z in Circuits > Arduino
102 Views, 2 Favorites, 0 Comments
Puppy Toy That Reacts to Your Call

Creating an interactive plush puppy is an exciting project. Imagine a cuddly companion that's more than just a soft toy - one that can actually respond to your voice and move toward you!
This project will guide you through designing a unique interactive pet that combines simple mechanical engineering with smart technology. By integrating Arduino boards, motors, and microphone amplifiers, we'll transform an ordinary plush toy into a charming, responsive friend that brings a touch of magic to your home.
Supplies
- Walking Dog Interactive Electronic Plush Toy: Buy Here
- Arduino Nano ESP32: Buy Here
- Electret Microphone Amplifier – MAX9814 with Auto Gain Control: Buy Here
- DC Motor: Already included in the toy.
- L9110H H-Bridge Motor Driver for DC Motors: Buy Here
- Mini Toggle Switch
- Wire
- Soldering tools
- Needles and threads
- Hot glue
Preparing the Toy Dog
- Carefully separate the fabric exterior from the internal structure by opening the seam along the belly. Once the fabric is removed, the inner mechanical parts should be visible.
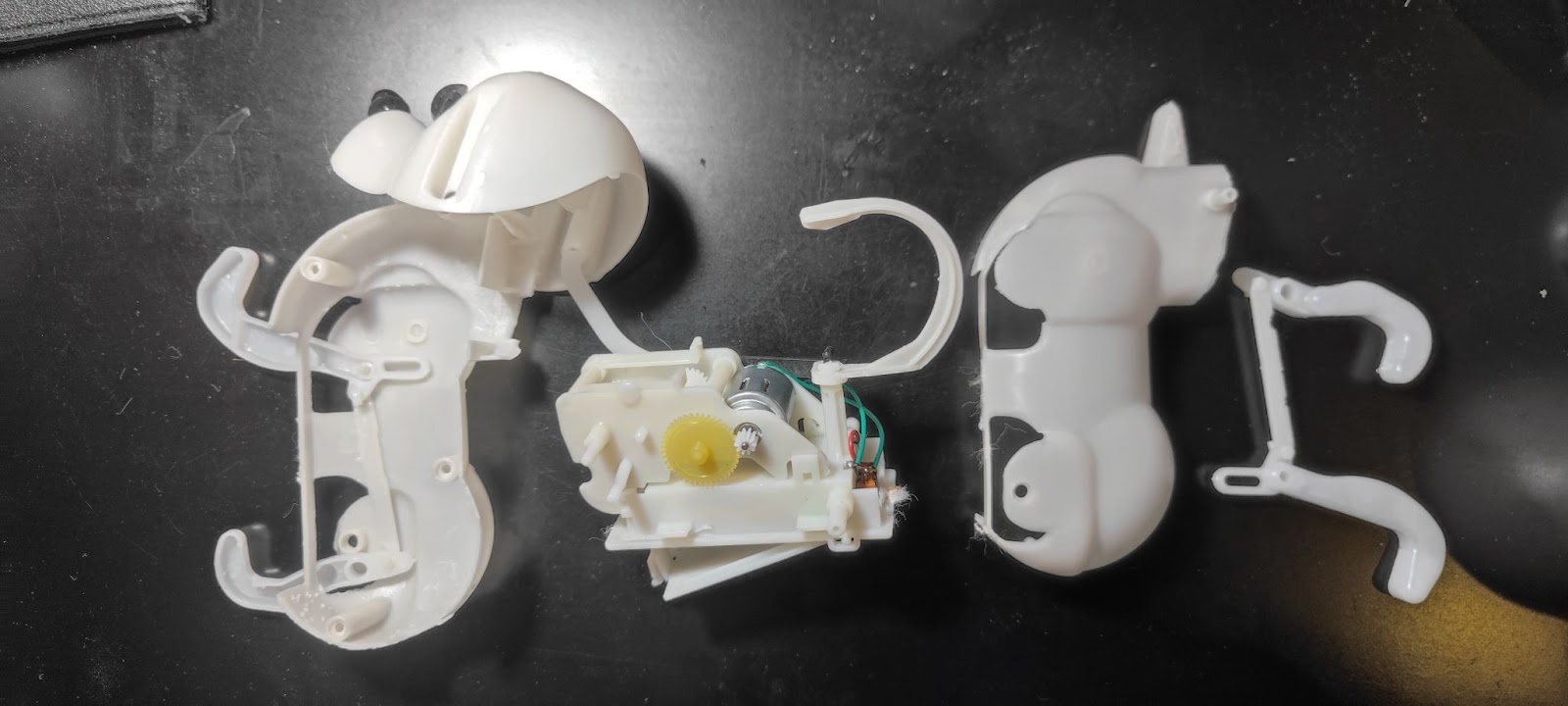
- Open the body by unscrewing three screws. Only remove the plastic outer shell and head—leave the mechanical components intact.
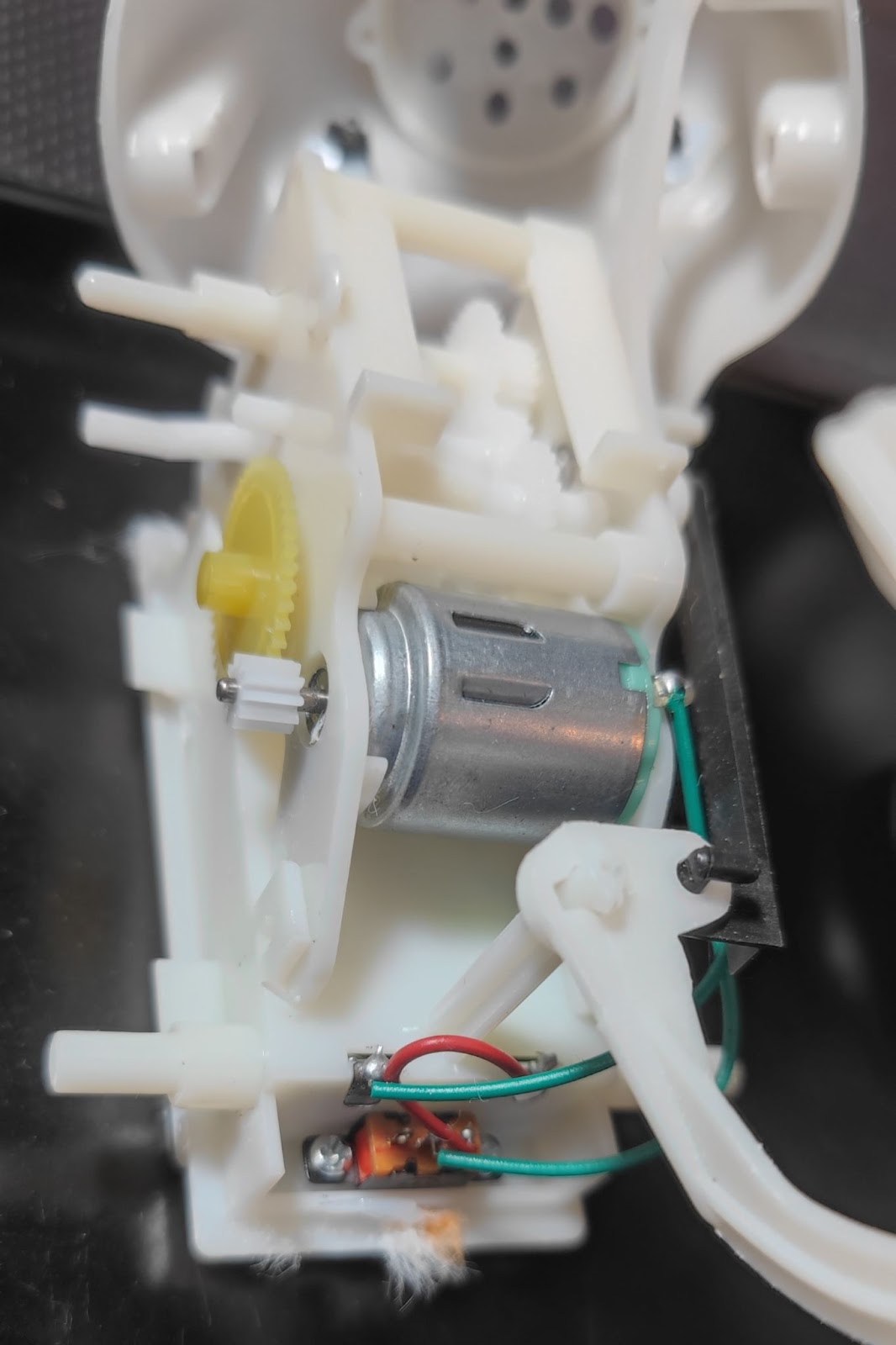
- Disconnect the existing wires connected to the motor. These will be replaced later.
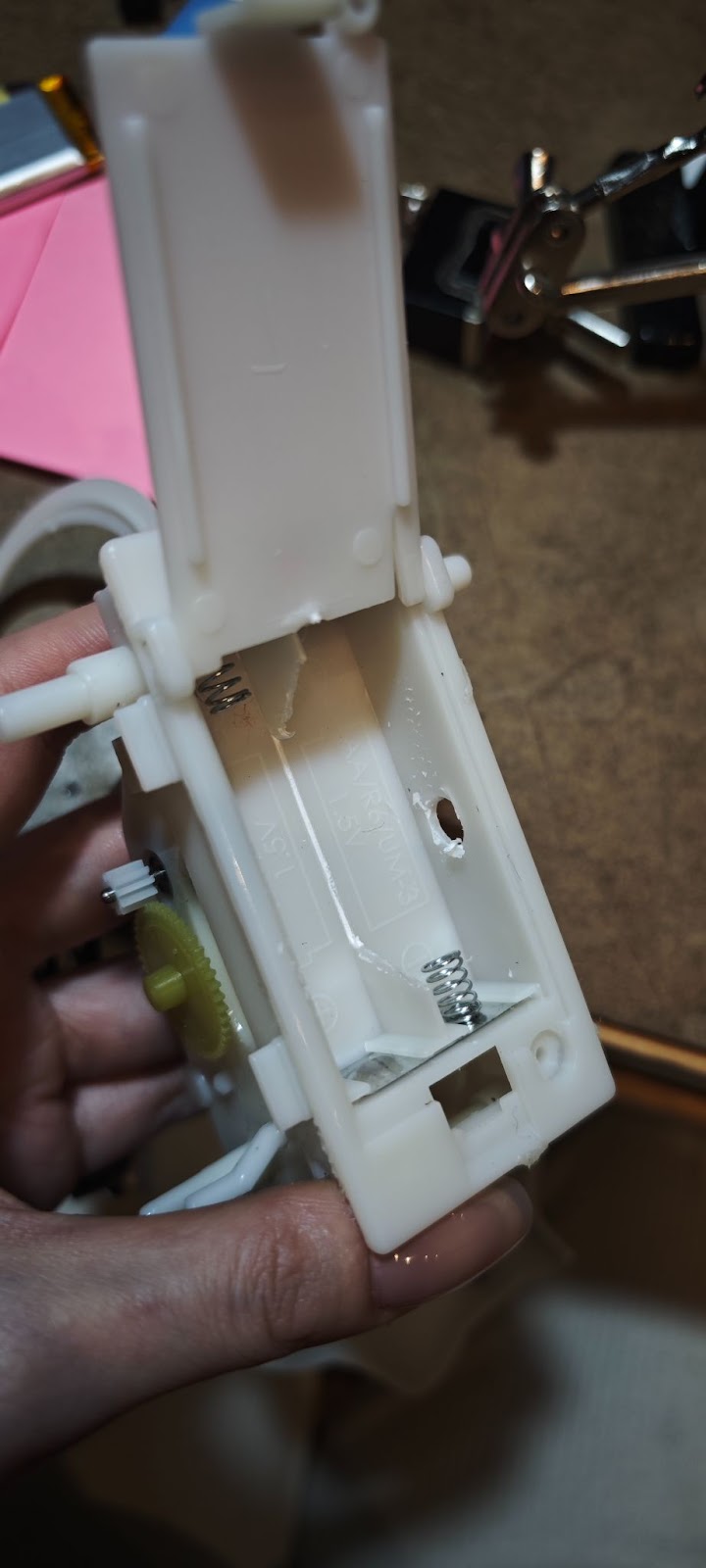
- Modify the battery compartment:
- Cut away the internal plastic dividers to create space for the new battery and switch.
- Drill a hole in the side of the battery compartment for the wires to pass through.
- Drill another hole in the battery compartment lid for the toggle switch.
Your dog toy is now ready to be upgraded with its new "brain"!
Building the “Brain”
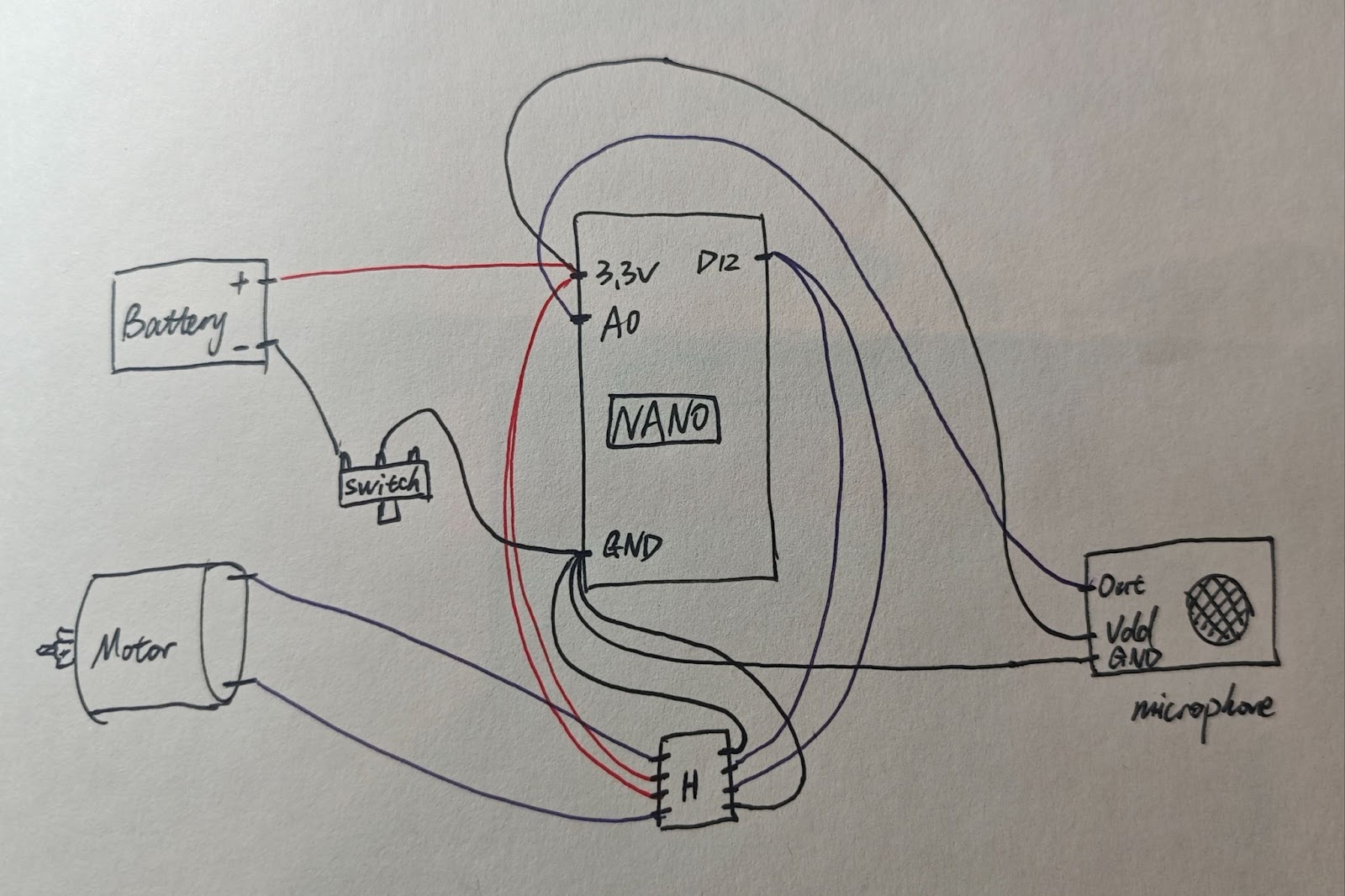
Circuit Diagram:
Coding
The code is listed below. In the sound recognition code, you can calibrate the microphone sensitivity for different environments. Here are some suggestions:
- Monitor the Input Signal: You can check the microphone value in the Serial Monitor. This helps you understand the range of values the microphone produces in your environment.
- Adjust Sound Thresholds: Based on the average sound level and the value when it detects your call, set sound thresholds for your environment. In my case, My average sound level is 1300-1600, and when I’m calling it’s 1700-2000. So I adjusted my sound threshold to 1700.
- Adjust the noise canceling function by changing the sample count: The current code uses 5 samples to calculate the average (SAMPLE_COUNT = 5). In noisy environments, you might need to increase the number of samples to smooth out random noise or reduce the samples if your environment is quiet.
I’ve added a 0.5-second delay when the microphone detects my call, giving the impression that the dog is pausing to think, "Is my owner calling me?" Feel free to remove this delay if you prefer a more "responsive" dog.
Downloads
Soldering the Components
- Solder all components except the battery. Make sure to keep wires short and flexible to fit inside the dog’s head
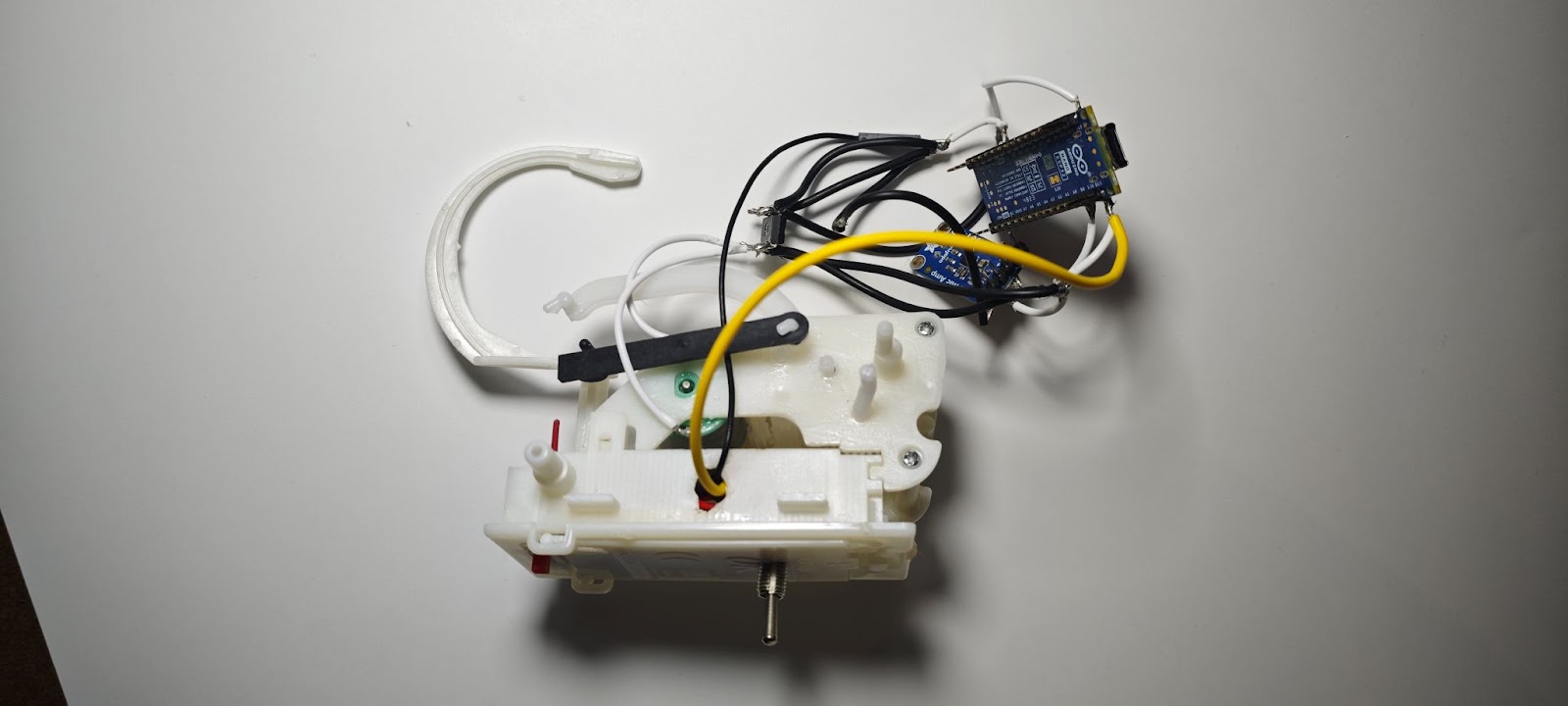
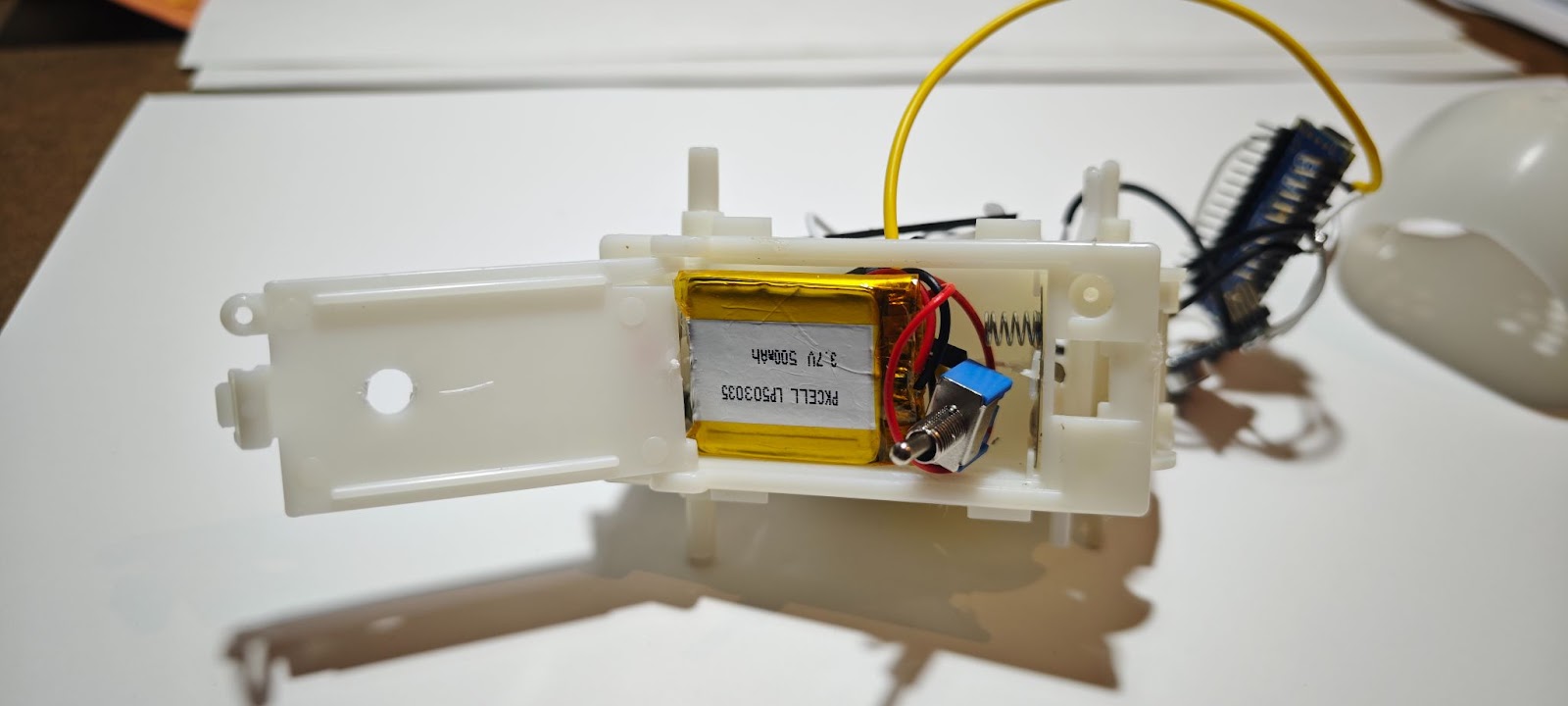
- Connect the battery to the Arduino Nano using longer wires and place the battery in the modified battery compartment.
- Use hot glue and electrical tape to secure all components.
- Double-check all connections to ensure proper functionality.
Reassembling the Toy Dog

- Re-attach the internal plastic shell and secure it with screws.
- Slip the fabric cover back over the toy.
- Use hot glue to seal the fabric along the battery compartment edges.
- Stitch the previously opened seam to close the toy.
Your interactive dog toy is now complete! Call its name, and it will happily walk toward you.