Micro:bot Assembly EHMS

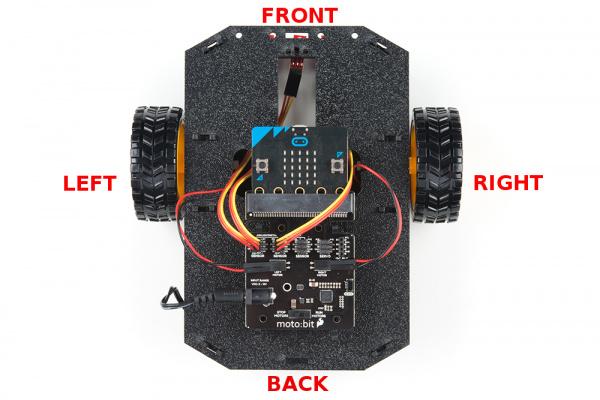
This instructable will show how to assemble your robot. This assembly does not require any tools for creation and may take up to 30-60 minutes or more.
Supplies

To start, you will need these pieces shown.
Assembling the Motors
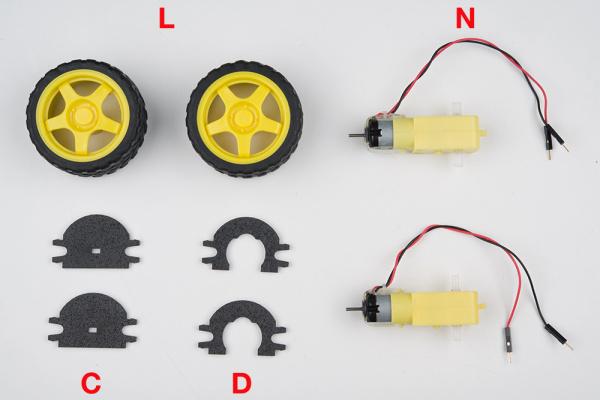


You will need the pieces shown in the image above to start this step. Once you have those pieces, put them together so that they look like the second and third image shown.
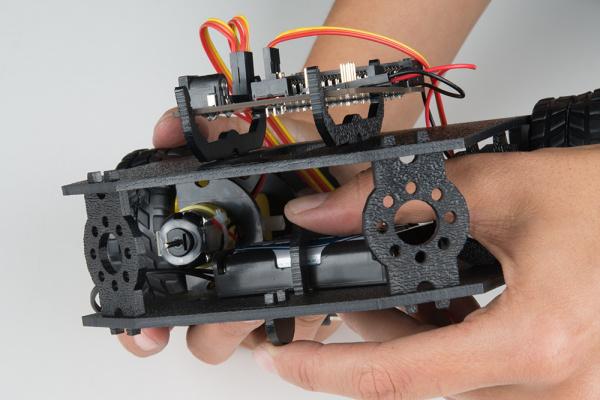
Assembly
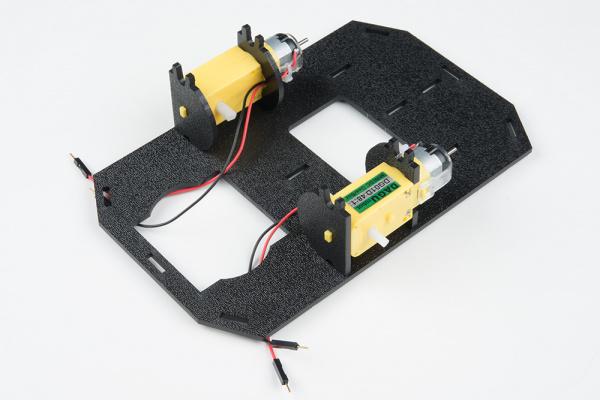
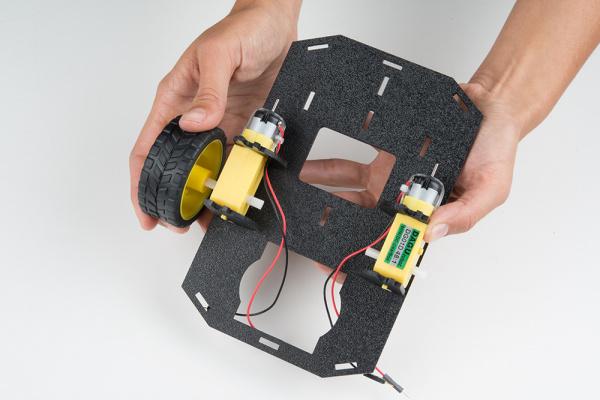

Once you have finished the previous step, attach them onto plate A as shown on the first image. Once you have attached the motors, attach the wheels to them on each side.
Installing the Line Sensors
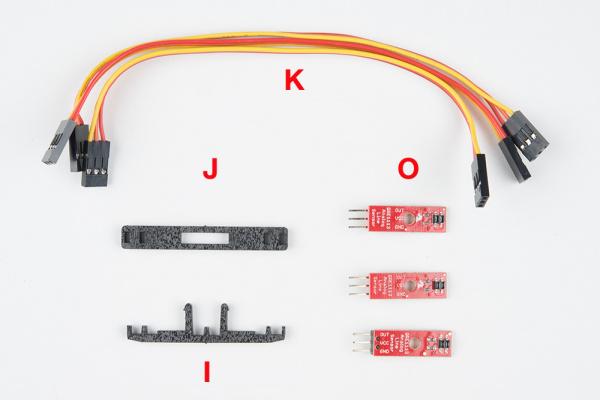
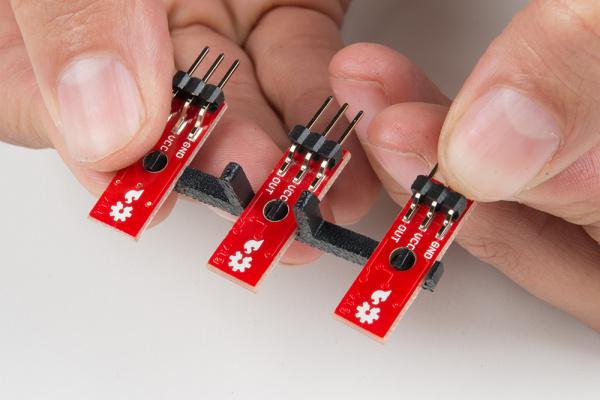

You will need the parts shown in the first image for this. Once you have those pieces, put them together like in the images shown above.
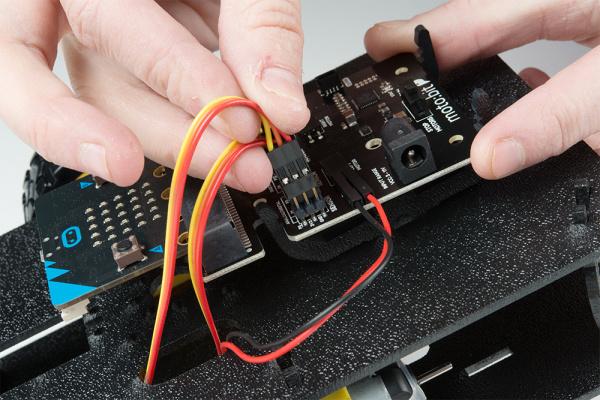
Attaching the Line Sensors
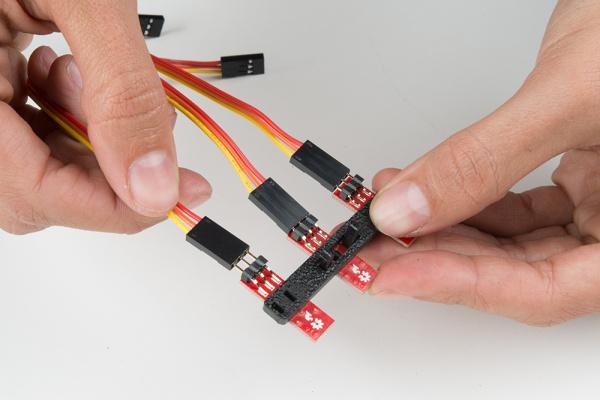

You will attach the wires to the sensors with red going to GND, orange to VCC, and yellow to OUT. Once you have the wires attached you will attach it to the base with the motors.
Prepping to Add the Top Plate
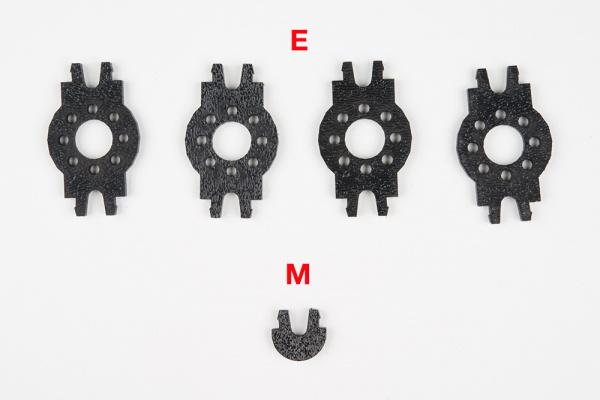
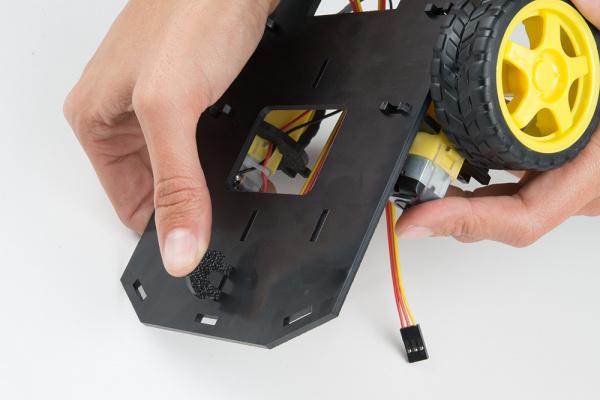


Once you are done with the previous steps grab these parts in the first image shown. Now flip over the base to show the bottom. You will then attach part M to the bottom and flip it over once again after it is attached. You will then attach the part E pieces onto the corners of it, the smooth side facing inwards like shown in the image above. By the end it should look like the fourth picture.
Attaching the Top Plate


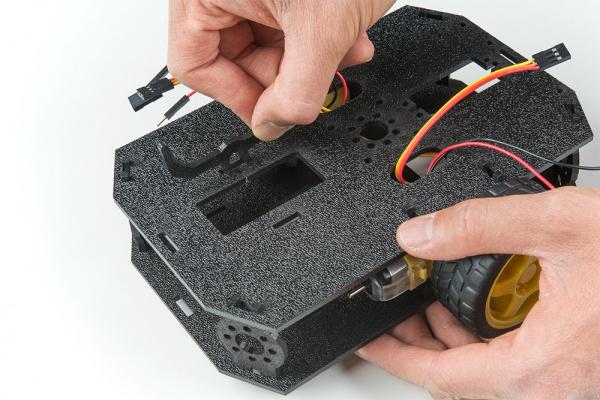
You will push it together until you can get the prongs on all sides on the bottom to go through the plate, the rough side of the plate facing up. Once it is attached, feed the wires through the holes on the left and right side middle as shown in the image.
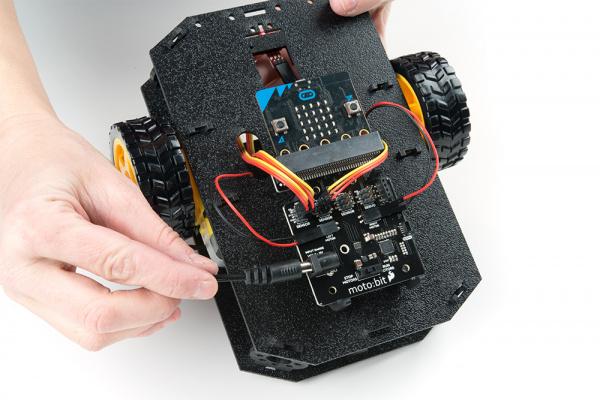
Attaching Moto:bit
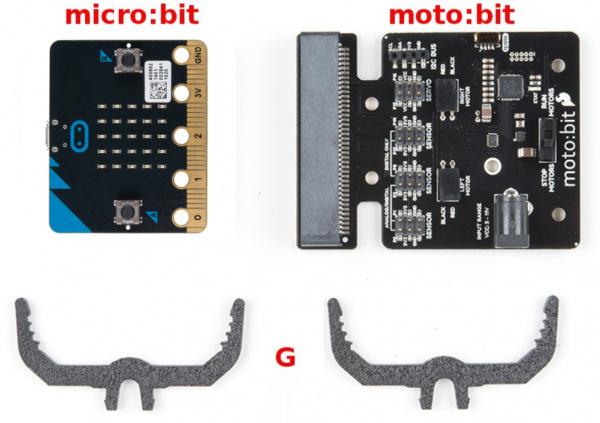


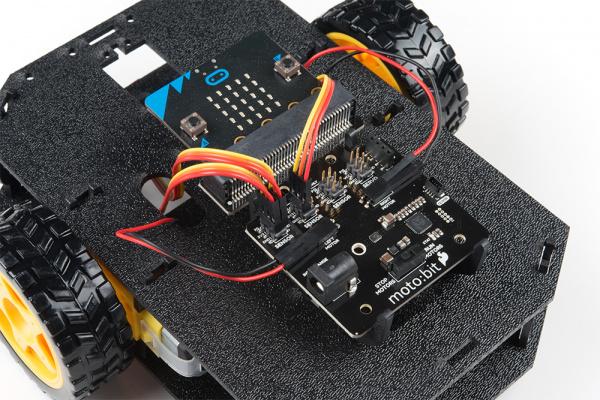
You will need the parts shown in the first image now. You will push part G into the holes until the prongs go through fully, and the rough sides is facing away from each other when both in. Once you have installed them, it should look like the third image. You will then insert the moto:bit and micro:bit. They can be inserted without the micro:bit attached beforehand. You can pull apart the prongs so that you can put the moto:bit in easier, but don't pull too much or it may break. Once done it should look like the fourth image.
Attaching the Wires
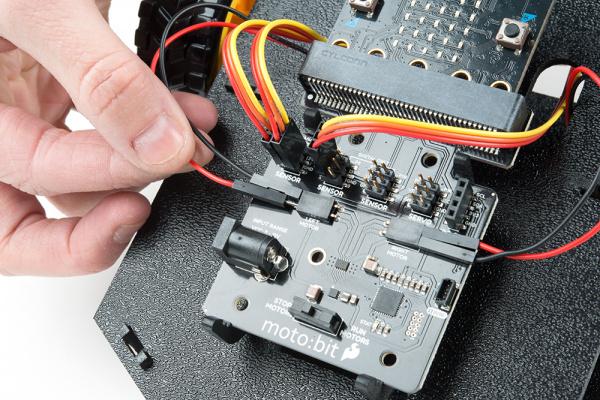
With the wires you previously fed through the holes, you will attach it onto the moto:bit, the wires for the sensors going onto the prongs labelled "Sensor" and the wires for the motors going onto the "Left Motor" and "Right Motor" category. Make sure you have the correct side for the motors when you attach them. The yellow wire going to OUT, orange to VCC, and red to GND. The left line follower going to P0, center line follower to P1, and the right line follower going to P2. The motor wires would be connected like the third image shown.
Attaching the Batteries
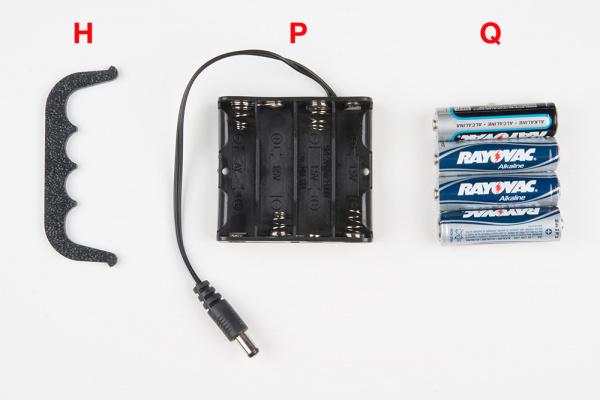
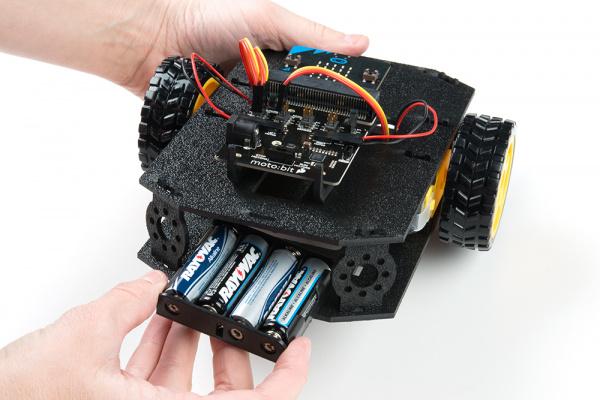
For the batteries you will need the three pieces shown. You will insert it into the bottom and keep it in place with part H. Finally you will plug it in after putting your code in and turn on the motors.
Driving and Turning Code
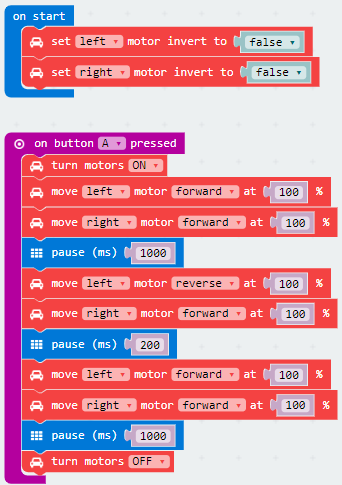
This is a script made in MakeCode for your bot to drive and turn.