How to Make a Micro Hexacopter
by Constructed in Circuits > Remote Control
11753 Views, 127 Favorites, 0 Comments
How to Make a Micro Hexacopter

.gif)
Well, since one of my later instructables seemed to be pretty popular, I thought I should make something similar! So I decided to make a micro hexacopter! Just like the micro quad, the micro hex is relatively cheap, easy to build and is so much fun to fly, whether its indoors or outdoors! The micro hex actually turned out to be quite challenging to make, mostly because its quite difficult to find a flight controller that can handle six motors! The Hexacopter flies extremely well and is extremely stable in the air. When compared to a quadcopter, flying the hexacopter is a completely different feeling, If I had to describe it in words, its feels like flying a pizza box. Banking and turning take alot more room but this hexacopter is also much faster than a quadcopter so its a lot more exciting! I would highly recommend everyone to build this hexacopter whether you're a complete beginner or an advanced quadcopter pilot.
Why build a Hexacopter instead of a quadcopter?
- To put it simply, more motors = more thrust. This can come in handy when lifting a heavier frame, and makes for lots more speed. Having six propellers give the micro hexacopter more maneuverability and flying power than say a micro quadcopter
But what the heck is a micro Hexacopter?
- A hexacopter is a type of multirotor drone configuration where there are a series of six arms with motors used to propel the craft. By changing the speed of each motor in synchrony its possible to achieve motion!
Gathering Parts

The reason this instructable took so long to make, was because trying to find parts that would work together was nearly impossible! In order to save you time, I've compiled the whole list below. One thing to note is that this project will require a Taranis or another FrSky Transmitter.
Extra 20% OFF Discount For RC Quads: https://goo.gl/BMxGAI Banggood March Easter Bargain:https://goo.gl/uUxAZY
YOU WILL NEED


Transmitter (FrSky) cccccccccccccccccccccccccc Eachine Flight Controller


FPV Cameraccccccccccccccccccccccccccccc Motors (Buy 6 motors)


Reciever (FrSky)ccccccccccccccccccccccccccccc Hexacopter frame


Propellers ccccccccccccccccccccccccccccccccccccccccc Batteries
Parts List
1. Transmitter: http://www.gearbest.com/rc-quadcopter-parts/pp_20...
2. LANTIAN Spider 150 HEX-6 Carbon Fiber DIY Frame Kit: https://goo.gl/M8pbCf
2. 3 Set Walkera QR Ladybird Blades Propellers: https://goo.gl/Zn43XO
3. Racerstar 8520 53500RPM Coreless Motor: https://goo.gl/kN14i8
4. Eachine 32bits F3 Brushed Flight Control Board: https://goo.gl/vbSvuH
5. Tiny Frsky 8CH Receiver: https://goo.gl/RFVvYI
6. Battery: https://goo.gl/5sPHWz
7. FX FX798T 5.8G NTSC Mini Transmitter Camera Combo: https://goo.gl/7fhFS0
My original attempt I tried to use these parts below...But it didn't work out. They would work great for a micro quadcopter though!
Mini FPV Camera: https://goo.gl/7OPcnZ
Flight Control Board Built-in Receiver: https://goo.gl/XcnQ0X
(8% OFF Coupon For Following Items: ToysHo)
Motor Layout




The first step in building the hexacopter is to arrange the motors. Designate one side of the hexacopter to be the front (I used the side with a tab to add the fpv camera onto) and place the motors according to cleanflights Hexacopter X formation. The RED and BLUE motors are Clockwise with Red being Positive Blue being Negative
The BLACK and WHITE motors are COUNTERCLOCKWISE with Black being Negative and White being negative
Take the motors and align them onto the hexacopter frame in the correct order (Motor 1: CCW, 2: CW, 3: CCW...)
ccccccccccccccccccc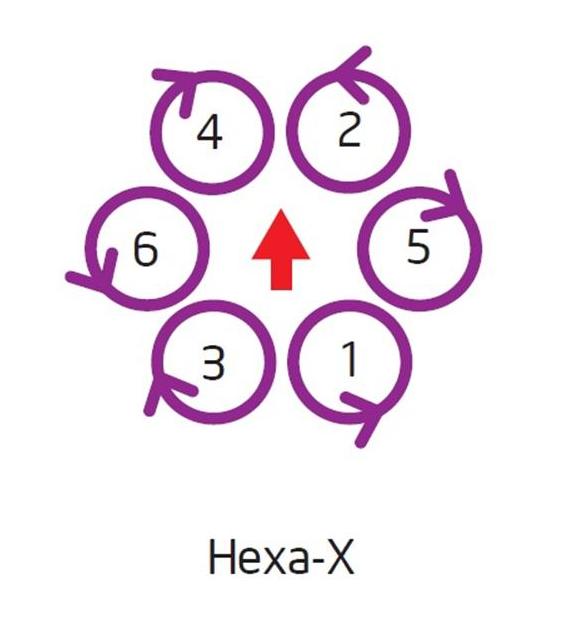
however you do need to be careful when soldering the motors to the controll board. If you look carefully, you will notice that the motor layout on the flight controller goes1,5,2 then 3,6,4. On the other hand, cleanflight's Hexacopter X goes 1,6,2 then 3,5,4. To solve this, follow cleanflights configuration and wire the motors across (Swap 5 and 6)
Soldering






Now its time to connect everything together! Turn you soldering iron on and strip/tin the motors leads and solder them to they're respective spots on the flight controller. At the same time, add the lead to connect the battery to the flight controller. Next get the receiver ready. On the reciever in the (SBUS section of the board) You should notice 3 tabs: S + and -. Now on the Flight controller look for the UART 2 Section and you will notice a square tab followed by two more tabs. This is the - + and S Input section, and all you have to do is solder them up! (S to S, + to +, - to -)
If youre having trouble finding the tabs, look at the pictures above.
Binding


Next, Plug a battery into the flight controllers battery connector you just soldered on. If everything was correct, you should see LED's on both boards lighting up. Unplug and re plug the battery, but this time, hold the bind button on the receiver down. While holding the button down (It might turn into a tricky twister game) grab the taranis and create a new model. Hit page and go scroll down and change the mode to D8 and then hit Bind. The receiver and Transmitter bind almost instantly and you can now unplug the battery and turn off the bind function. Re plug the battery and if the LED is solid green, that means the receiver is bound!
Cleanflight




Now plug the Hexacopter into cleanflight and flash with the latest SP Racing software. Then connect the board and set the board up in the hex X formation. Go to ports and enable Serial RX on UART2. On the reciever tab make sure the option is on RX_SERIAL,and then set up the receiver brand with SBUS. You should be able to see the channels moving correctly in the little boxes. In the modes tab, don't forget to assign a switch to arm and disarm the hexacopter. Next go to CLI and type Type: set motor_pwm_rate=32000 and then type: Save.
And honestly I left everything else at default, pids rates and all! But this is your Hexacopter so play around with settings until you find something you like!
Add Props and Optional FPV








In my last micro quadcopter tutorial I felt like I wasn't so clear on how to add FPV. I hope this sums it up better! Take the micro fpv camera and transmitter and cut the plastic connector off. Then strip and tin the leads and solder them directly to the battery input tabs of the flight contoller. This will give the camera the 3.7 volts it needs to operate. Then plug in a battery and check if the LED's light up. If so tune the frequency by using the buttons on the cameras body to match up with your fpv goggles. Then using some hotglue, mount the camera to the front of the hexacopter.
To add propellers just put clockwise props onto the clockwise motors and counterclockwise props onto counterclockwise motors then simply push them into place. Dont press too hard or you could damage the motors however.
Go Fly!





Now power everything up and go fly! If you have never flown before, I highly recommend the DRL simulator to practice flying
I really hope you had fun building this hexacopter, and if so, dont forget to follow me to stay updated on new projects!
Instructables or Youtube or Instagram
Also, dont forget to vote for how to make a micro hexacopter in the contests!
Thanks!