Dolpicamera #phablabs


.png)
In this project we have made a Dolpi camera, that is a camera that takes pictures based not only on the intensity and wavelength of light (like normal cameras do), but also based on its polarization.
To achieve this, we’ll wire an ordinary cheap webcam and a servomotor with a Raspberry Pi Zero W. The servomotor has a polarizer attached to it. So when the servomotor moves, it rotates the polarizer. As the polarizer is in front of the camera lens, we get different pictures for each rotation angle. By comparing the pictures (the software does all this for us), we get a polarization resolved picture.
The camera will be accessible with any device that has WiFi access, for example a laptop or a smartphone, via an intuitive web interface. As an application, this camera might theoretically be used to locate landmines, detect invisible pollutants or to identify cancerous tissues.
Properties of this workshop:
Timeplanning: Total: 2h10
1. Understanding the concept of polarization: 25 minutes
2. Constructing the casing: 25 minutes
3. Soldering: 20 minutes
4. Programming the Raspberry Pi: 20 minutes
5. Final assembly: 20 minutes
6. Testing: 20 minutes
Target audience: Students (15-18 years old)
Estimated cost: € 45
DISCLAIMER: By using this information you agree to be legally bound by these terms, which shall take effect immediately on your first use of the information. PHABLABS 4.0 consortium and its member organizations give no warranty that the provided information is accurate, up-to-date or complete. You are responsible for independently verifying the information. VUB cannot be held liable for any loss or damage that may arise directly or indirectly from the use of or reliance on the information and/or products provided. PHABLABS 4.0 consortium and its member organizations disclaim all responsibility to the maximum extent possible under applicable laws: All express or implied warranties in relation to the information and your use of it are excluded. All liability, including for negligence, to you arising directly or indirectly in connection with the information or from your use of it is excluded. This instruction is published under the Creative Commons licence CC-BY-NC.
What Is Polarization?








We all know the sun is the ultimate source of existence for nearly all living species- no sun, no life! As the sun will continue to shine for about five billion years, you don’t have to worry for now. Instead, let’s see what we can learn in the meantime.
Photo 1: The sun emits a huge amount of light waves to the earth.
Light is made up of waves that travel in space. Try to trace the path of a single light wave with your hand. You will find that there are different directions in which the wave can oscillate. It might go up and down or it might go back and forth - or maybe something in between. Photo 2.
So while different light waves might share a common direction in which they travel, they might still have a different direction in which they oscillate. For example, in photo 3 you see three different waves (red, green, blue). The green waves oscillates back and forth, the blue wave oscillates up and down an d the red wave has chosen to oscillate somewhere in the middle.
This phenomenon is called polarisation. The plane in which a wave oscillates is called a plane of polarisation. If all waves coming from a light source share the same plane of polarisation (that is, all oscillate in the same direction) the light is said to be linearly polarised.
Typical gadgets which emit linearly polarised light are, for example, lasers and LCD displays. But most light we deal with in our daily life is not linearly polarised – instead, all the individual light waves have a different plane of polarisation. In this case we call the light unpolarised.
You already know the biggest source of unpolarised light. Exactly: It’s the sun!
It is possible to filter light according to its polarisation using polarisers. A polariser is an object that only lets through light waves with a certain plane of polarisation. When you send an unpo- larised light beam through a polariser you will end up with a linearly polarised light beam at the other side. This way, you can compare it with a fence or gap, which would only let through items oscillating in the direction of the opening. Photo 4 is an example where only the light waves moving up and down are let through. A beam of unpolarised light is filtered by an oscillator resulting in a beam of linearly polarised light.
Now imagine the following: A second polariser (called analyzer) is placed behind the first one. When the orientations of the two polarisers match, the linearly polarised light coming from the first polariser is let through the second one. However, if you turn the analyzer by 90° the light is blocked entirely as the light does not match with the orientation of the first polariser. Photo 5: In this scheme the light wave is represented by a wave moving on an oscillating rope. The role of the polarisers is played by picket fences.
Example 1:
You can try this out with a polariser sheet and an LCD display (i.e. a laptop, TV, smartphone). Just hold the polariser in front of the display and rotate it. As the LCD emits linearly polarised light, the light is only let through when the orientation of the analyzer and the plane of polarisa- tion match. If you turn the analyzer by 90°, you will notice that nearly all the light is blocked. Photo 6
Example 2:
You can easily try this out with two polarisers. Just place them behind each other and rotate one of them. Photo 7
Now we get to the interesting part: There are materials which rotate the plane of polarisation of the light that goes through them. These materials are called optically active. Now, if you place an optically active object between the two polarisers, the linearly polarised light will be rotated. So, when it reaches the analyzer, it will again (at least partly) match with the orientation of the analyzer – the light is not blocked anymore! Photo 8
Cellophane, a substance often used for transparent films, shows optical activity. So you can take a cellophane film, cut an artful pattern into it, and place it between two polarisers. Voilà – you‘ve made your own artwork based on polarisation optics! You can also see different colours. The colours change with the number of sheets which are piled up. This is what we‘re doing in another project: https://www.instructables.com/id/Art-With-Polarization-light-phablabs/
Part List





Photonics parts:
*USB webcam
*Linear polarising sheet ( 4x2,5cm)
Other parts:
*Raspberry Pi Zero W Kit
*Servomotor SG90
*MicroSD card 16GB
*Plywood/MDF: 3mm thick
Tools (for example in Fab Labs):
*Laser cutter
*Scissors
*Screwdriver
*Superglue
*Wood glue
Don't find the material you are looking for? Via this link you could buy all the photonics material needed for this workshop. http://b-photonics.eu/photonics-toolkit/general-p...
Working Principle


Let’s examine how “normal” digital cameras take pictures. The camera takes the light from its surroundings using an optical system made up of lenses and projects it onto a sensor (like a CCD or CMOS). The light carries information about its wavelength (defining the colour) and intensity (defining the brightness) and if you combine both, you’ll get a nice picture. Photo 1.
To recap: Cameras (just like our human eyes) take into account two properties of light: wavelength and intensity. But wait: Didn’t we learn in the last section that light – as a transversal wave – also shows the phenomenon called polarization?!
So we might in fact add another physical quantity to the image – the degree of polarization. And this is what our Dolpi camera will do. In photo 2 you will see how.
We’ll simply put a polarizer in front of the camera. As you’ve learned, the polarizer will only let through light with a certain polarization. If you rotate the polarizer, you also rotate the plane of polarization of the portion of light that can go through. When light is unpolarized, there should be no difference in the amount of light that can pass through when you rotate the polarizer. That is because all polarization angles are uniformly distributed. Thus, the camera picture will be quite the same.
However, if our light shows some linear polarization, there should be a difference. Like with the polarizer in front of the LCD screen (see last page) the amount of transmitted light will greatly vary for different rotation angles and therefore you get a different image.
Now, remember that we want to measure the degree of polarization to construct a picture out of it. The strategy might be as follows: We’ll put the polarizer in front of our camera and take a picture. Next, we’ll rotate the polarizer by 90° and take another picture at the same scene. Then, we take all the pixel intensity values P1(x,y) from picture one and all the pixel intensity values P2(x,y) from the second picture and calculate the absolute value of the difference P(x,y):
P(x,y) = | P1(x,y) - P2(x,y) |
If the light is unpolarized, there should be no big difference between the two corresponding pixel intensities. Because of this, P(x,y) should be close to zero. However, if the light is linearly polarized, there should be some difference and P(x,y) should be substantially bigger than zero. If we now visualize P(x,y) as a picture, we’ll clearly see the spots of the photographed scenery that emit or reflect linearly polarized light.
Note that we will elaborate our concept further by taking more than just two pictures and thus get- ting more reliable and precise data about the degree of polarization.
The rotation of the polarizer will be performed by a cheap servomotor. The camera will be an easy webcam and everything will be plugged to a Raspberry Pi.
Raspberry Pi

Photo 1: For the electronics part, we take a Raspberry Pi Zero W (1). This is a very small computer that is powerful enough to perform calculations with pictures (an Arduino would probably be too weak for this). In order to keep things short and simple, we will call it RasPi from now on. As we need to control a servomotor, we also need a male pin header (2) which will later be soldered to the RasPi. A microSD card (3) and an appropriate adapter or a card reader will be used to program the RasPi. To connect our webcam and a monitor, we also need a USB-microUSB adapter (4) and a HDMI-mi- croHDMI adapter (5). A power supply (6) (5 V, 1 A) is, of course, also necessary. Furthermore we will use a USB hub and an ordinary PC.
When it comes to the peripherals, we need a simple USB webcam and a servomotor. The webcam should be compatible with Linux as this is the operating system that is installed on our RasPi.
For the housing, we’ll use common plywood sheet with a thickness of 3 mm. The different parts will be assembled using wood glue. And last but not least, we need a polarizer in the form of a polarizing film sheet!
Building the Housing



In this step we‘ll be using a laser cutter machine. Make sure you‘ve understood all necessary security regulations. Especially, it‘s important to keep the laser casing shut during operation!
Take the plywood sheet and put it into the laser cutting machine. We provide a file with the designed pattern: Dolpi.svg and schijf polariser.svg (see attached). Make sure you have the appropriate laser parameters set! For plywood with a thickness of 3 mm processed by a 40 W CO2 laser we determined the following parameters to be optimal:
•Speed: 65 %
•Power: 90 %
•Pulse frequency: 500 Hz
Adjust the sheet within the laser cutter and let the process start: Photo 1,2
Now, the laser head will cut out the parts from the plywood sheet. Once finished, take the plywood out of the machine and try to assemble the different parts, at first without using glue. It should look like photo 3.
{kind=link}
{kind=link}
Preparing the RasPi Board



Solder the pin heads on the RasPi board
Other than the “full-grown” version of the Raspberry Pi, our cheap Raspberry Pi Zero comes without pins attached to it. This is why we have to solder some pins to the RasPi in order to later connect it to a servomotor (or perhaps other peripherals that do not use USB). Please be careful:
• The soldering iron will become very hot. It should never touch your skin.
• Do not apply heat on the RasPi for too long
(not more than about two seconds per application) as this might otherwise damage the RasPi.
Photo 1: First, put the pin heads on a solderless breadboard and fix the RasPi on top of them, so that the backside of the board is on top (see figure). Next, start to solder the pins to the Pi. Be careful not to create any unwanted electrical connections between the different pins. Especially it is dangerous to link GND and VIN. This would result in a short circuit and might damage or even destroy the RasPi. If unsure, check the connection between two pins with a multimeter. The resistance between these two pins should at least be in the order of magnitude of 1 MΩ or so. (Use the multimeter after removing the RasPi with the pins from the breadboard as the electrical connections on the breadboard might otherwise affect the measured resistance.)
Program the RasPi
The RasPi gets its information from a microSD card that contains the operating system and the other programs it has to execute. Thus, we have to write all this data on the microSD card. Stuff the card into an adapter and connect it to a PC. (If your PC already has an appropriate slot you can connect it directly, of course.)
Luckily for you, we have already prepared an ISO image for you which you can simply write on the card in one step without worrying about all the different files that it contains (https://drive.google.com/file/d/1W6xCdXRQU9llVYOJ2RZK2_JYYL6Xs_f8/view?usp=sharing). There are many programs that can do this. Here, we’ll use Win32 Disk Imager. (Freely downloadable if not already on your PC.) Start the program and choose the provided image file DolpiCam.iso, select the correct device containing the microSD card and click “Write”. Be very careful not to select the wrong storage medium or else there is a risk of data loss! Once the writing process has finished, remove the microSD from the PC/adapter and stuff it into the RasPi. Photo 2, 3
Later on, we’ll take a closer look on what we’ve written on the microSD card, but for the moment, we don’t care too much about this.
Connect the Pi and See If It Works



•Connect a USB hub to the microUSB-USB adapter and attach the latter to the Pi.
•Plug a computer mouse, a keyboard and the webcam to the hub.
•In order to see something, connect the miniHDMI-HDMI adapter to the Pi and link it to a monitor.
•Connect the black wire of the servomotor to pin 6 (GND), the red wire to pin 1 (3,3V PWR) and the yellow wire to pin 11 (GPIO 17) of the Pi. Use jumper wires if necessary. Photo 1, 2
•Connect the RasPi to the power supply. The Pi will now boot the operating system on its microSD card.
After about one minute, the desktop interface shows up on the monitor. You should also be able to use mouse and keyboard. Now let’s see if the Dolpi functionality is working as desired. Open the web browser Chromium and go to http://localhost/. A website like photo 3 should show up.
Click on the colourful shutter on the left-hand side of the browser window (only once). The servo- motor should now begin to move and the webcam should take pictures. After the measuring process has finished, you should see the resulting photos in the browser.
Now, take another PC with WiFi access (a smartphone is also OK), activate the wireless mode and see if you can find a network called “DolpiCam_XYZ”, where XYZ is a random string. If yes, connect to the network, open a web browser and go to any website. You should again see the same interface and you should be able to start the measuring process just the same.
Troubleshooting:
• The camera doesn’t work: Open up the application “Cheese”. It should instantaneously show the signal from the webcam. If it doesn’t, try to re-connect the camera and/or to reboot the Pi. If all this does not work, try the camera on another computer if it works at all. Keep in mind that we use Linux as operating system and that not all webcams are supported by Linux.
• The servomotor does not respond: Are all wires connected correctly? Connect a multimeter between pins 1 and 6 to see if there is really a voltage supply of 3.3 V.
• The WiFi network is not there: Move closer to the Pi.
See Why It Works (optional)

In this step we’ll look at one of the program files that make our Dolpi cam run as desired. This step is recommended for those interested in computer science in general and programming in particular. Everyone else can move on to the next step. In the RasPi user interface, open a file manager (that’s the folder icon in the control bar at the top of the screen) and browse to the directory /home/pi/DolpiCam/. Double-click on the file server.py to open it in a text editor. This is the script file that organizes the webserver that provides access to the Dolpi cam. It is written in the programming language Python. Scroll to the bottom of the file and identify the function measure() Photo 1
measure() is called each time the user clicks on the button to start the measurement process, that is, each time the URL measure/ is called in a browser. First, the servomotor is switched on by calling the function ServoOn(). After this, we move the servomotor to three different angles (45°, 90° and 135°) and take a picture at each position. These pictures are subsequently stored in the variables img1, img2 and img3.
These three pictures represent the spatial light intensities for three different planes of polarization. For unpolarized light, there will be no big difference between these intensities (see the section about the working principle on one of the previous pages). However, when light is linearly polarized, there will be a difference. This is why we calculate the difference using the function cv2.absdiff for all three picture pairs.
Next, we look for the biggest difference (np.fmax) and save it as the resulting image (cv2.imwrite). In the end, the servomotor is switched off again (ServoOff).
Put It All Together










.png)
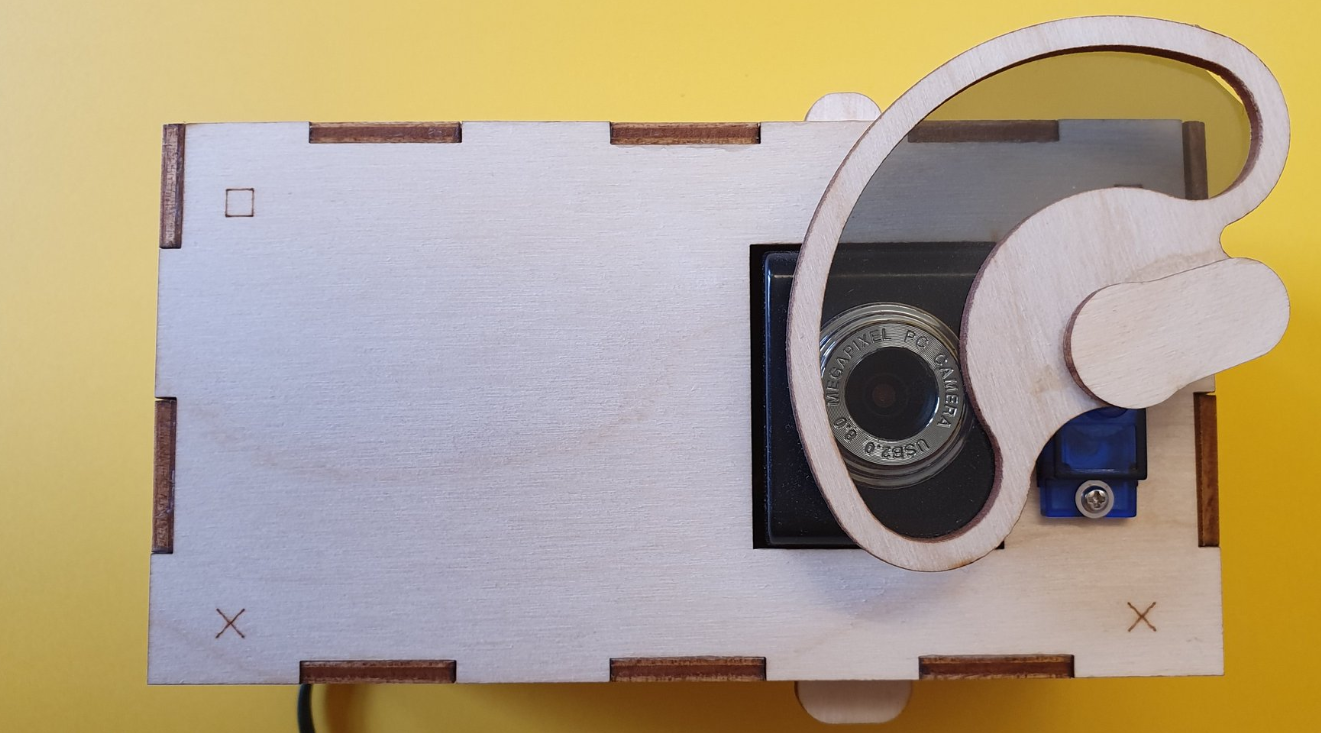
Follow the steps according to the order of the photos. Glue all parts together, except from the back of the box in order to be able to open again.
Cut out the polariser in the shape of the frame. Glue the polariser with super glue onto the frame. Insert the head part of the servomotor in the foreseen recess and cover that with the small wooden oval. Click this part on top of the servomotor.
Switch off the Pi and disconnect it from power supply. Disconnect the HDMI adapter (including the monitor) – for future use, we will use the WIFI interface instead. Disconnect the USB hub. Instead, connect the webcam directly to the USB adapter. Now mount everything in the housing at its des- ignated site and make sure the camera looks directly through the polarizer to the outside world.
Try it out
Re-connect the Pi to the power supply, wait two or three minutes and try to connect to the WiFi network using a smartphone or computer. Does it still work?
Now, take several pictures. If the camera doesn’t look through the polarizer film at all angles, you should re-adjust the head part of the servomotor.
It is important not to move the camera during the measurement process as it will take three pictures in total and these pictures should be taken exactly from the same viewpoint.
If all works as desired, you should be able to tell apart linearly polarized light from unpolarized light. It is easiest to photograph an LCD screen. As you know, LCDs emit linearly polarized light. In the resulting picture, the screen should be shown in bright colours whereas the surroundings are rather black.
End Result & Conclusions



 (Small).jpg)

You may ask what a Dolpi camera is good for, apart from identifying an LCD display (which is really no big deal). To answer this question, think back to what we learned about the working principle of ordinary cameras.
Cameras take light from the outer world. Where does this light come from? Well, unless you look directly into the sun or another light source, most light that is taken by the camera is somehow scattered or reflected on the surfaces of the objects that surround us, thereby making these objects visible. Photo 1
Light from the sun is completely unpolarized, that is, all different planes of polarisation are present. Normally, if light falls onto a surface, not all light is reflected. There may be also some light that is absorbed or even transmitted. The percentage of light that is reflected is called reflectance.
The reflectance is usually dependent on the wavelength (=colour) of the light, thereby giving objects their characteristic colour. Moreover, for some materials, the reflectance also exhibits a characteristic dependence on the plane of polarization – light will be linearly polarized once it is reflected on the surface.
And this is where our Dolpi cam comes in handy! With it, we can identify objects with a considerable difference of the reflectivity for different planes of polarisation. It turns out that many man-made materials (like glass, plastic, metal) belong to this group. So we may make them visible. Photo 2
Some researchers claim that it is possible to detect landmines (photo 3) with Dolpi cameras as their surfaces are man-made and are therefore in contrast to the ground on which the lie. What do you think? Which challenges or problems might occur on the search for landmines using a Dolpi camera? Which chances do you see for this technology?
ABOUT PHABLABS 4.0 EUROPEAN PROJECT
PHABLABS 4.0 is a European project where two major trends are combined into one powerful and ambitious innovation pathway for digitization of European industry: On the one hand the growing awareness of photonics as an important innovation driver and a key enabling technology towards a better society, and on the other hand the exploding network of vibrant Fab Labs where next-generation practical skills-based learning using KETs is core but where photonics is currently lacking. www.PHABLABS.eu
This workshop was set up by the Ferdinand Braun Institut in close collaboration with Technische Hochschule Wildau and ViNN:Lab.