Design and Implementation of Autonomous Fruit Plucking and Segregation Robot in Vertical Farming
by kgauravshet2022_mid in Circuits > Raspberry Pi
857 Views, 6 Favorites, 0 Comments
Design and Implementation of Autonomous Fruit Plucking and Segregation Robot in Vertical Farming





Autonomous fruit plucking and segregation robot introduced for vertical farming and also in normal farming which replaces the overall manual harvesting without causing any damage to the fruit.
Supplies
- Raspberry Pi 4B
- L293D Driver
- Servo Motor MG995 X5
- PCA9685 Driver IC
- 9V Battery
- USB Webcam
- DC Gear Motor X4
- 5V 2A Power bank
- Wire
- L-Bracket clamp for DC Gearbox Motor
Webcam and Image Detection
- Enable the webcam access in the Raspberry Pi configuration setting and run the main program, once the main program is started to execute all servos will be in its initial position.
- Real time object detection is performed on the tomatoes, to find its colour and shape.
- Once the object is read from the webcam, then it is compared with pre-defined mask values of red, green and yellow colour.
Servo Control and Robot Motion
- If detected tomato is red then, robot locomotion is stopped, webcam is disabled, gripper servo will pluck the tomato and base servo will rotate its base to 0 to 90 degree and drop it in basket 1 and again all servos will reach to its initial position and again camera is enabled to detect the tomato.
- If detected tomato is yellow then, robot locomotion is stopped, webcam is disabled, gripper servo will pluck the tomato and base servo will rotate its base to 0 to 180 degree and drop it in basket 2 and again all servos will reach to its initial position and again camera is enabled to detect the tomato.
- If tomato is in green colour, then the robot locomotion will not be stopped, it is continued till it detects either red or yellow colour tomato.
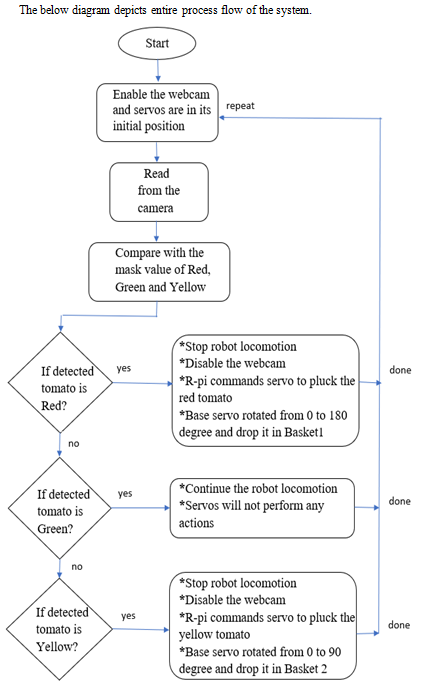
Algorithm Flowchart
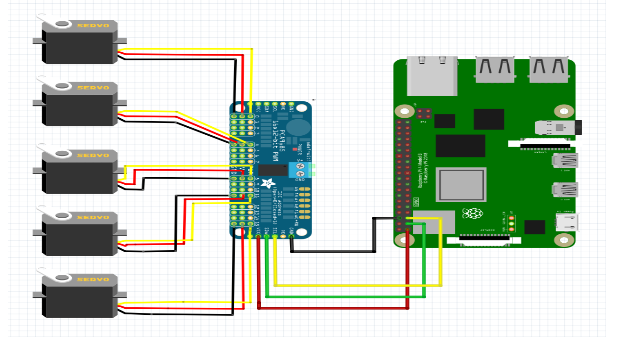
Interfacing servos with PCA9685 module
Working Demonstration Image

Code
import time
import sys
from videocapture import VideoCapture
import RPi.GPIO as GPIO
from motor_driver import L298N, MG996R
from tomato_detector import TomatoDetector
# General Configuration
robot_speed = 50
thershold_distance = 10
#Tomato Types
RED_TOMATO = 'RED'
YELLOW_TOMATO = 'YELLOW'
# GPIO Configuration
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
# Motor Driver Pins
ENA = 26
IN1 = 19
IN2 = 13
IN3 = 16
IN4 = 20
ENB = 21
# Arm Servo Channels
base_servo_channel = 0
s1_servo_channel = 1
s2_servo_channel = 2
s3_servo_channel = 3
gripper_servo_channel = 4
# Static values for arm position
base_servo_init = 0
base_servo_basket_red = 125
base_servo_basket_yellow = 90
s1_servo_init = 10
s1_servo_basket = 10
s2_servo_init = 90
s2_servo_basket = 150
s3_servo_init = 170
s3_servo_basket = 150
gripper_servo_init = 100
gripper_servo_grip = 50
def set_arm_init():
print("arm moving to initial position...")
s1_servo.setangle(s1_servo_init)
s2_servo.setangle(s2_servo_init)
s3_servo.setangle(s3_servo_init)
base_servo.setangle(base_servo_init)
time.sleep(1)
for _ in range(10):
motor_controller.backward(robot_speed+10)
print("done..")
def set_arm_basket(TOMATO_TYPE):
print(f'arm moving to {TOMATO_TYPE} basket ')
s1_servo.setangle(s1_servo_init+5)
s2_servo.setangle(s2_servo_init+23)
gripper_servo.setangle(gripper_servo_grip)
#s2_servo.setangle(s2_servo_init-5)
if TOMATO_TYPE == RED_TOMATO:
base_servo.setangle(base_servo_basket_red)
elif TOMATO_TYPE == YELLOW_TOMATO:
base_servo.setangle(base_servo_basket_yellow)
s3_servo.setangle(s3_servo_basket)
gripper_servo.setangle(gripper_servo_init)
time.sleep(1)
print('done..')
def main():
print("----------------main-----------------")
while True:
img = camera.read()
red_distance = red_tomato.get_distance(img)
yellow_distance = yellow_tomato.get_distance(img)
if (red_distance != None) and (red_distance < thershold_distance):
print('red tomato detected')
motor_controller.stop()
set_arm_basket(RED_TOMATO)
set_arm_init()
elif (yellow_distance != None) and (yellow_distance < thershold_distance):
print('yellow tomato detected')
motor_controller.stop()
set_arm_basket(YELLOW_TOMATO)
set_arm_init()
else:
motor_controller.backward(robot_speed)
def test():
print("-------test---------")
#gripper_servo.setangle(gripper_servo_grip)
#base_servo.setangle(base_servo_basket_red)
#s1_servo.setangle(s1_servo_basket+20)
s2_servo.setangle(s2_servo_basket)
#s3_servo.setangle(s3_servo_basket)
#s3_servo.setangle(s3_servo_init)
s2_servo.setangle(s2_servo_init)
#s1_servo.setangle(s1_servo_init)
#base_servo.setangle(base_servo_init)
#gripper_servo.setangle(gripper_servo_init)
if __name__ == '__main__':
try:
# Instantiation of Controllers
motor_controller = L298N(ENA, IN1, IN2, IN3, IN4, ENB)
red_tomato = TomatoDetector(RED_TOMATO)
yellow_tomato = TomatoDetector(YELLOW_TOMATO)
camera = VideoCapture(0)
base_servo = MG996R(base_servo_channel, base_servo_init)
s1_servo = MG996R(s1_servo_channel, s1_servo_init)
s2_servo = MG996R(s2_servo_channel, s2_servo_init)
s3_servo = MG996R(s3_servo_channel, s3_servo_init)
gripper_servo = MG996R(gripper_servo_channel, gripper_servo_init)
main()
#test()
except Exception as e:
print(e)
finally:
print("exiting...")
GPIO.cleanup()
camera.release()
sys.exit()