DRONE WITH APM (EASIEST WAY)
by NEW G INNOVATION BECOMES REAL in Circuits > Remote Control
6138 Views, 29 Favorites, 0 Comments
DRONE WITH APM (EASIEST WAY)

In this tutorial i'll show you how to make a drone with apm in an easy manner.
Drones can be used for transporting things quickly and also for aerial photography
The total cost of my project is around 200 $.
THINGS REQUIRED FOR THIS PROJECT
brushless dc motor 4 nos (i am using 1200kv)
f450 frame
30 A esc (4 nos)
transmitter and receiver 6 channel
apm flight controller 2.8 or 2.6
gps module
telemetry module ground and air
propeller 1045 (4nos)
female to female jumper wires (6nos)
zip ties(cable ties)
Download the mission planner software http://ardupilot.org/planner/docs/common-install-m...
SOLDERING THE ESC'S
First of all start by soldering the esc's and the battery connector to the bottom plate. Make sure that the positive and negatives wires match positive, negative signs on the plate.The best way is to add some solder on the plate and some solder on the wire and then solder them. Use silicon wire for the battery connector.
CONNECTING THE MOTOR TO THE ARMS OF THE QUAD
.jpg)
Screw the motors in a way that the wires are on the arm.Use proper screws because if you dont, it may harm your motors.
FINISHING THE FRAME
.jpg)
Screw all the arms to the bottom plate(use screw lock while doing this).Then screw the top plate to the arms(again,use screw lock). Place the esc on the arms and use a zip tie to lock it in place.Then connect the wires from the motors to the wires of the esc(it is better to use bullet connectors).
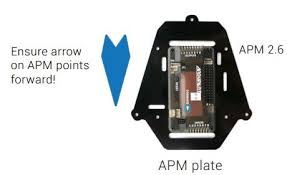
MOUNTING THE APM
.jpg)
Mount the apm on the top plate with double sided tape and if u have a anti vibration plate mount the apm on it.Mount the apm in a way that the arrow on the flight controller points towards the side which u want your drone to face.
CONNECTIONS TO THE RECEIVER
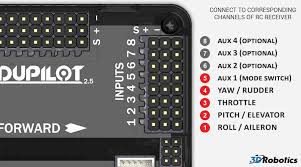
APM INPUT PIN 1 - RECEIVER PIN 1
'' PIN 2 - RECEIVER PIN 2
'' PIN 3 - RECEIVER PIN 3
'' PIN 4 - RECEIVER PIN 4
'' PIN 5 - RECEIVER PIN 5
THE APM INPUT PINS AND RECEIVER PINS ARE SIGNAL, +, - RESPECTIVELY FROM LEFT
CONNECTIONS OF THE ESC
.jpg)
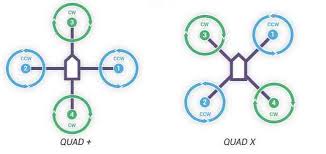
FOLLOW THE MOTOR LAYOUT GIVEN CONNECT THE ESC'S ACCORDINGLY. THE SIGNAL WIRES SHOULD FACE UPWARDS (NORMALLY).
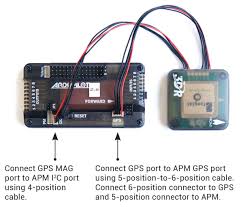
CONNECTING THE COMPASS
.jpg)

THESE ARE THE IMAGES TO BE FOLLOWED FOR THE CONNECTION OF THE GPS MODULE OR COMPASS. ONE OF THEM TO 12C AND OTHER TO GPS. The wires from the compass cannot be interchanged as there is a difference in the number of pins. Fix the gps module under the bottom plate. The arrow on the gps module should point towards the direction which your APM faces.
CONNECTION OF THE TELEMETRY
TELEMETRY AIR MODULE SHOULD BE CONNECTED TO THE TELEMETRY PORT ON THE APM.
PROGRAMING THE APM
.jpg)
Download the MISSION PLANNER SOFTWARE and install it on your computer. Connect the APM to the computer with a micro usb to usb cable. The easiest way to program the quad is by the wizard. Program the quad accordingly to their instructions. After the programming make sure that the drone can be armed. Next step is to check the direction of the motor spinning. Mine is a x quad so my first motor should spin counter clockwise, second motor also counter clockwise, third motor clockwise and fourth motor also clockwise. If your motor is spinning in the opposite direction remove any 2 wire and interchange them and connect it again.
FIRST FLIGHT


Now connect your propellers (LOOK UNDER YOUR PROPELLERS YOU CAN SEE THAT IT WILL BE MARKED CW AND CCW CW MEANS CLOCKWISE AND CCW MEANS COUNTER CLOCKWISE CONNECT YOUR PROPELLERS ACCORDINGLY) and your telemetry module to the pc. Connect the battery to your quad. Open the mission planner software, select the port of your telemetry on the top right hand corner of the screen and press connect. The drone will be connected to the pc. Power on your transmitter and move the throttle to bottom right corner and hold fore a few seconds, your drone will be armed. now slowly increase the throttle you can see that the motors start spinning . Increase the throttle until the drone starts hovering. If your drone is unstable do the compass calibration again. The easiest and the best way to do compass calibration is by following the methods i have done in the video .
TIPS
MOUNT THE APM AND GPS MODULE AS STRAIGHT AS POSSIBLE. MANAGE THE WIRES WITH ZIP TIES AND MAKE THE DRONE AS CLEAN AS POSSIBLE DO THE SOLDERINGS PROPERLY AND THE JOINTS SHOULD NOT BECOME A COLD SOLDER.
IF YOU HAVE ANY PROBLEMS YOU CAN CONTACT ME THROUGH EMAIL 7arrowsgaming1215@gmail.com