Covering Rotating Mass of ERM Motors
by eliett in Circuits > Wearables
424 Views, 2 Favorites, 0 Comments
Covering Rotating Mass of ERM Motors



Instructable Vibrotactile Sensory Substitution and Augmentation Device (https://www.instructables.com/id/Vibrotactile-Sens...) shows a way of how to build a device that translates a sensory input into vibratory stimuli. Those vibratory stimuli are produced by cylindrical ERM motors that have to be attached to some part of the body. There are ERM motors available that do not need further improvement for this use case (e.g., https://www.precisionmicrodrives.com/product/304-1....)
If you, however, want to use an ERM motor that does not come within a capsule (like the one on the pic), it is crucial to cover the rotating mass. Otherwise, people who are wearing the SSAD, might accidently stop the rotating mass.
Within this Instructable I want to introduce two ways of how to cover such a rotating mass:
- With a Vinyl tube
- With a 3D printed capsule
The Vinyl tube has the advantage of being cheap, easily purchasable and easy to attach.
The 3D print needs to be adopted for specific motor sizes (3D modelling skills required).
Supplies
Option 1 (Tube):
- Vinyl tube
- Thin soft board
Option 2 (3D print):
- 3D printer
- some 3D modelling skills
Tube

- Take one of your motors to a home improvement store.
- Find the Vinyl tubes in the store.
- Find a tube size that is as tight as possible around motor, but gives rotating mass enough room for movement. In my case (see pic with motor sizes), a tube with the diameter of 3/8 inches (0.95 cm) was the most suitable one.
- Wrap some thin foam board around the motor body. This layer has to be thick enough to fixate the motor in the tube, as visible in the picture.
3D Print

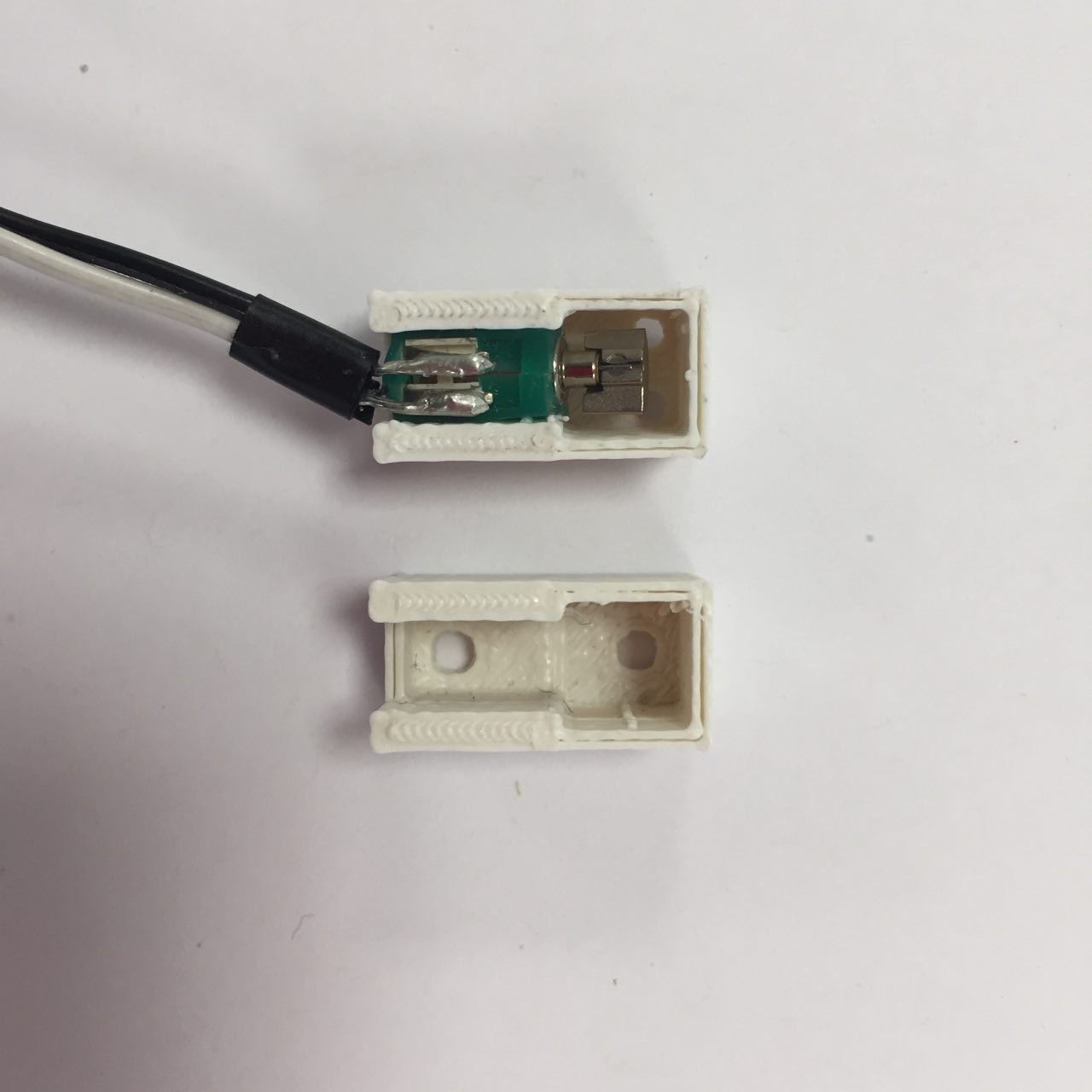
I tried two different 3D printed forms for covering the motor: one cylindrical and one rectangular. In my case, I wanted attach them to an armband as simple and flexible as possible. Therefore, there are, for example, sewing holes in the rectangular model. In the end, I decided to use the cylindrical form, as it felt more comfortable on the skin. Nevertheless, you both forms are available here:
- Go to https://www.thingiverse.com/thing:3806922 and find the 3D models, I created for my motors.
- Most probably your motors will have slightly different sizes than my. In this case, edit them in tinkercad (https://www.tinkercad.com/things/5NNu0YiR2cy).
- Print them.
If you decide to use the cylindrical form as well, you have to wrap the motor body with thin foam board like explained in the Tube Section.