CHOOM [06] 21 Axis Humanoid (Follower) Robot
by HappyThingsMaker in Circuits > Robots
1446 Views, 5 Favorites, 0 Comments
CHOOM [06] 21 Axis Humanoid (Follower) Robot

Previous Episodes
- EP 01: https://www.instructables.com/id/Control-1-Servo-M...
- EP 02: https://www.instructables.com/id/CONTROL-8-SERVO-M...
- EP 03: https://www.instructables.com/id/Wireless-Communic...
- EP 04: https://www.instructables.com/id/8-AXIS-HUMANOID-M...
- EP 05: https://www.instructables.com/id/8-AXIS-HUMANOID-S...
Supplies
Important Links

.png)
- 3D Modeling File (Upper Body) https://www.thingiverse.com/thing:2899499
- 3D Modeling File (Legs) https://www.thingiverse.com/thing:3003478
OVERALL INFORMATION
.png)
.png)
.png)
.png)
.png)
.png)
Arduino Humanoid Robot Project Example: This video shows how to assemble the 21 Axis humanoid robot. You can download all the files from Thingiverse. I designed every part of this robot.
In the previous episode, we made robots only upper body parts. This episode helps you assemble the legs part for the follower (client) robot. You will need to be careful when you assemble the horn with the MG90S servo motors. The center position is not known when you plug the horn into the MG90S servo motors. So, you will need to find the mid-point of the MG90S servo motors. There are two ways to find it. First, put the horn into the motor and rotate it until it stops. Once it stops, that is a limitation of the MG90S servo motor. From the angle, the MG90S servo motor can rotate approximately 200 deg. Rotate it manually until the other side limit. Then, you can find the middle point. Put the horn on the central location.
- Other Episodes: https://www.youtube.com/playlist?list=PLXEhuWdUlc...
Modifying Motors
.png)
.png)
.png)
Usually, RC servo ( we use MG90S) aren't designed for joint robots that need to hold frames, not only the front side but the back side. To use these RC servo motors as a joint motor, it would be best to change the backside of motors. I designed the part and uploaded it on the link. Please download and print them for this project.
Hip Joints
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
The hip joints are to make two motors into one frame. One is from the sides, and the other is from the fronts. Please take a look at the images and follow it one by one.
Eventually, this frame will be attached to the upper body, which turns this frame horizontally.
Thigh Parts
.png)
.png)
Calf
.png)
.png)
.png)
.png)
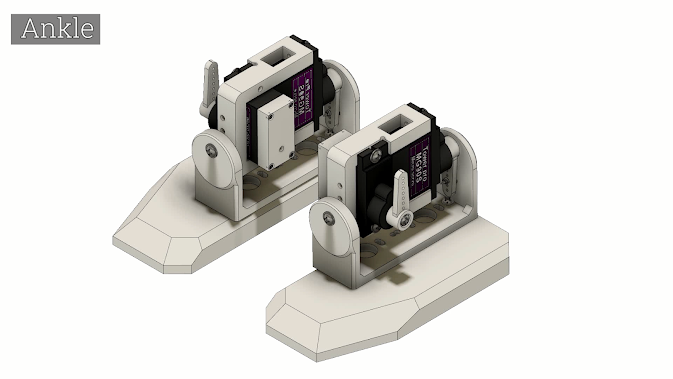
Ankle
.png)
.png)
.png)
Next Episode
.png)
Next time, you will see how to make the motors work with the i2c servo board.