(Autodesk Challenge) Drone and Communication System on Toyota Forklift Truck
by JingjingL in Workshop > Electric Vehicles
803 Views, 1 Favorites, 0 Comments
(Autodesk Challenge) Drone and Communication System on Toyota Forklift Truck

As Industrial design students of California College of the Arts, we were introduced to the competition as a class. After researching on our own, and listening to the designers in the Toyota group visit, I designed a forklift accessory for safety.
A drone camera and communication system on forklifts to provide a different perspective that helps drivers spot the irregularities in ongoing operations before accidents happen.
I have been using Fusion 360 for three years as my primary CAD and rendering software. This time I explored the generative design, assembly and animation function.
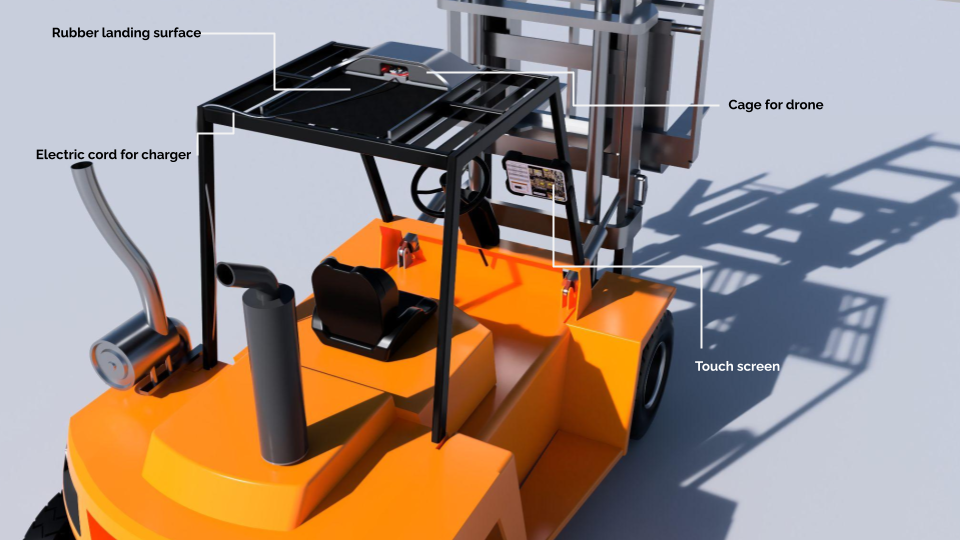
There are three parts of my product: a drone, a cage to protect the drone, and a screen to for the human machine interaction of the drone and communication.
For my process, I watched many forklift fail videos at first to understand the pain point, and then I talked to forklift drivers and people with warehouse experiences. I put my cardboard model on an actual forklift to test the scale, and then I referenced the Toyota and Lexus cars for the brand language.
Supplies
.png)
.png)
.png)
.png)
Autodesk Fusion 360, Figma
Research
.png)
Identify a problem that design can solve for, which is that forklift drivers can't see from a different perspective while they are inside the truck, and they lose the opportunity to stop the slowly-happening accident.
Ideate

A screen to show the driver another perspective to make better judgment, plus operating tips based on their situation.
Validate
.png)
Choosing between monitor camera on warehouse walls, camera on forklift overhead guard, and camera on drone, I choose drone, and designed the system to be as automatic as possible. The first version of drone was controlled by knobs, and land on a small box. The second version of drone is solely controlled by screen interface.
Refinement and Stylize
.png)

.png)
My design considerations are maximized automation, and durability in the warehouse environment. The drone is charged at all time when it sits inside the cage. The cage exterior is made by stainless steel, with rubber airbag inside as padding. The landing surface is rubber, which mimic the ideal landing surface- soft grass field. The landing area is large, ensures landing error tolerance, and the fixture to move the drone into the cage is able to push it no matter where it lands within the area. The interface incorporates auto track around object, auto return, and call for support features.
Use Fusion 360 for Final Deliverable

.png)

.png)

.png)
.png)
Using the Form tool in fusion to fine tune the form, importing a forklift model to readjust the scale, and rendering them together to show how it works in context.