Auto Retardation System
This project is developed by modifying the algorithm of object avoiding robot. Further, the robot in this instructable can be controlled by a smartphone via Bluetooth.
Components Required




1. Arduino Uno Board.
2. HC-05 Bluetooth Module.
3. SR-04 Ultrasonic module.
4. L293D Motor driver.
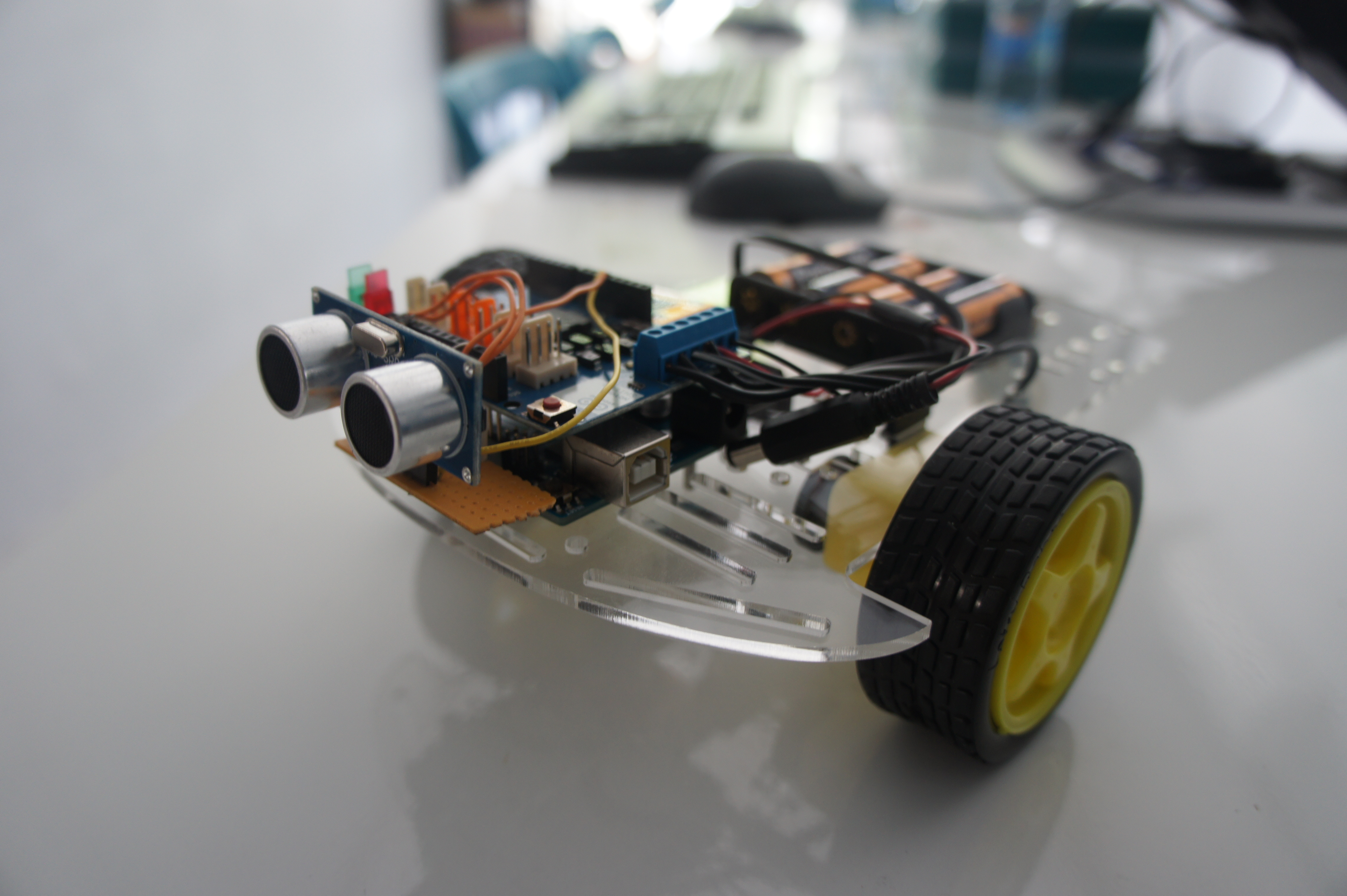
5. Chassis with the motors, wheels, and battery holder.
Pin Configuration
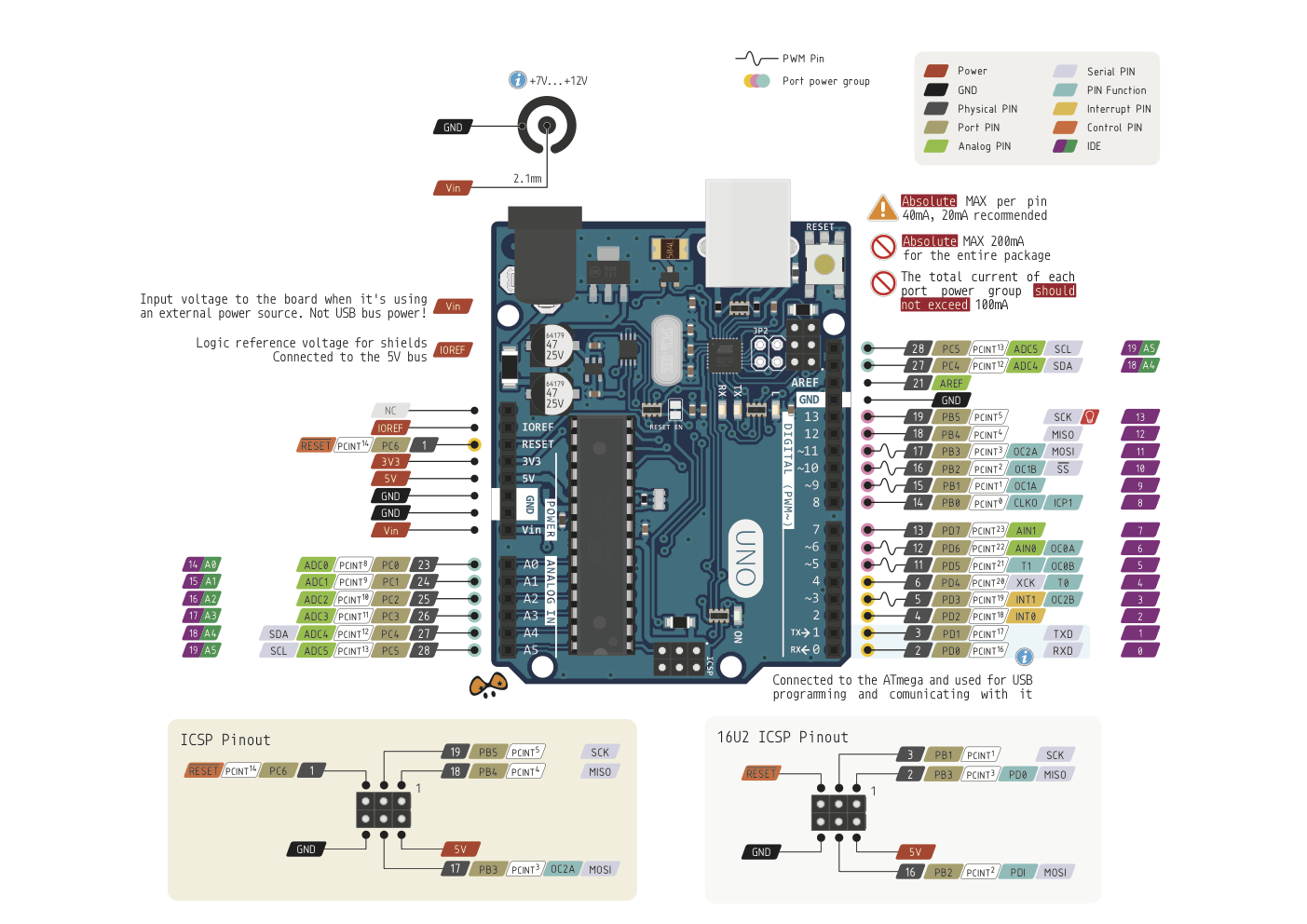
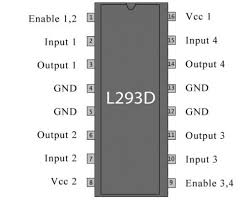
Refer the photos for the pin configuration of Arduino Uno and L293D IC.
Connections
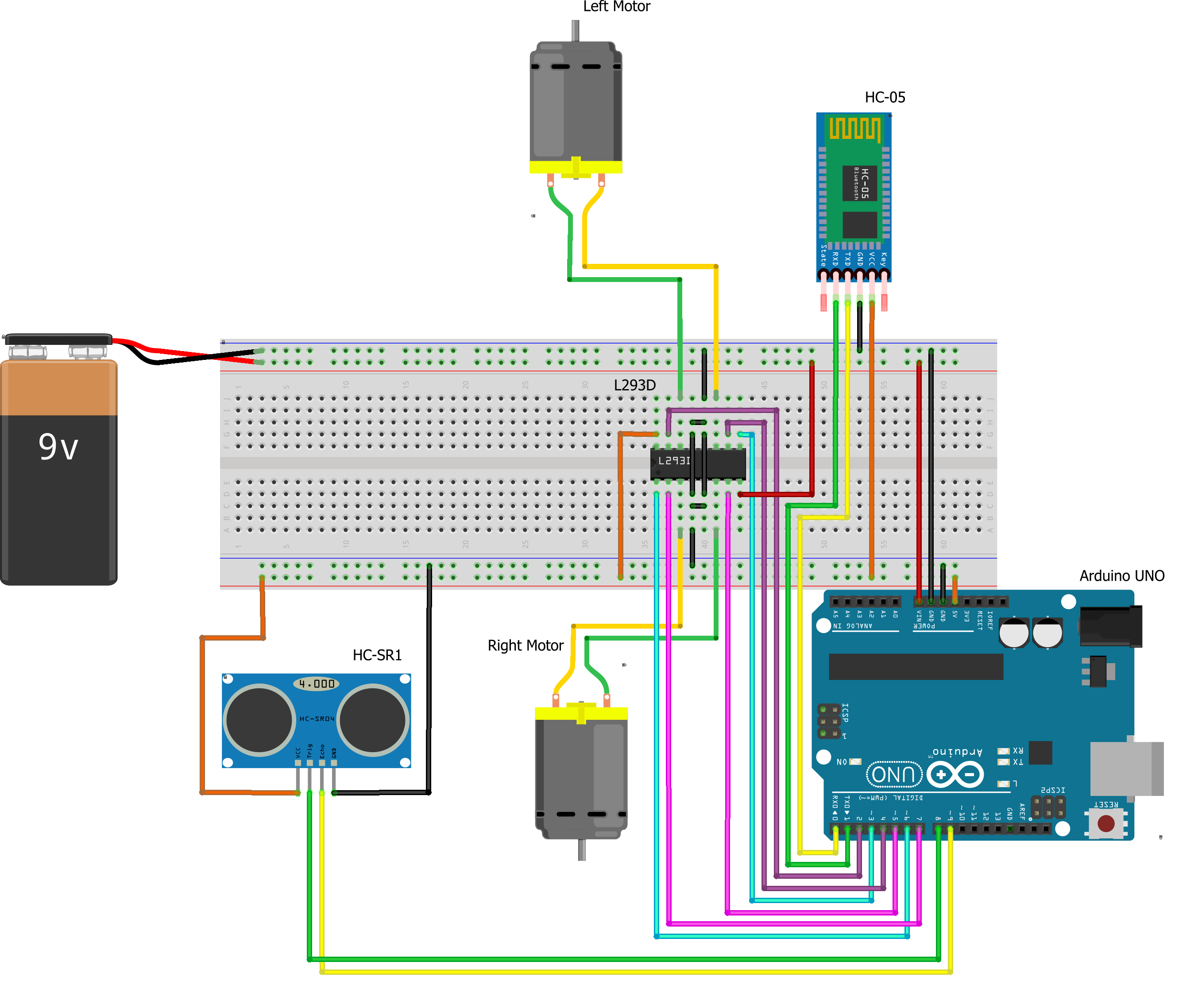
Connect the components as shown in the schematic, make sure that all the connections are correct. the Pin labels of SR-04 and HC-05 is already printed on the hardware.
Setting Up the Android Application
1. Download the " Android Bluetooth Controller" apk into the smartphone.
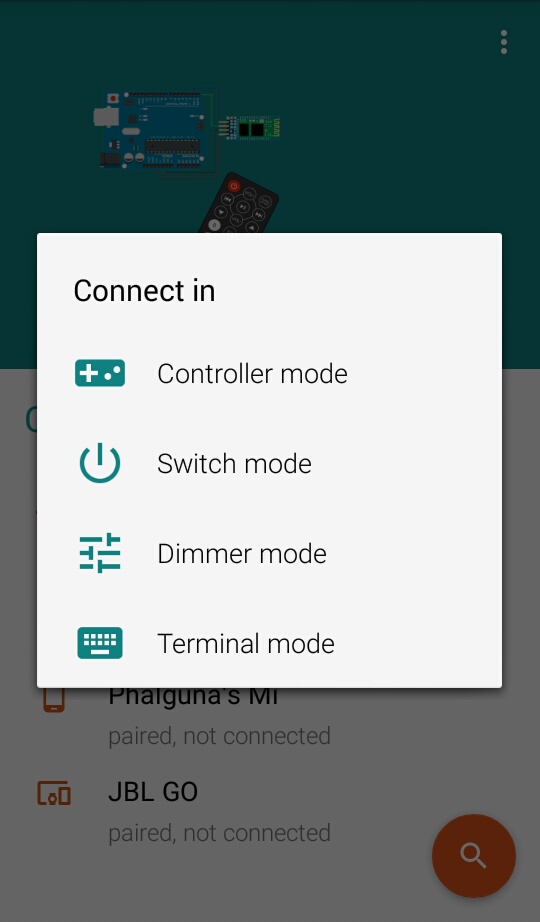
2. Once installed, one the app and connect to the HC-05. If password is required use "1234" or "0000".
3. Once connected, you can access four different modes;
a. Controller mode.
b. Switch mode.
c. Dimmer mode.
d. Terminal mode.
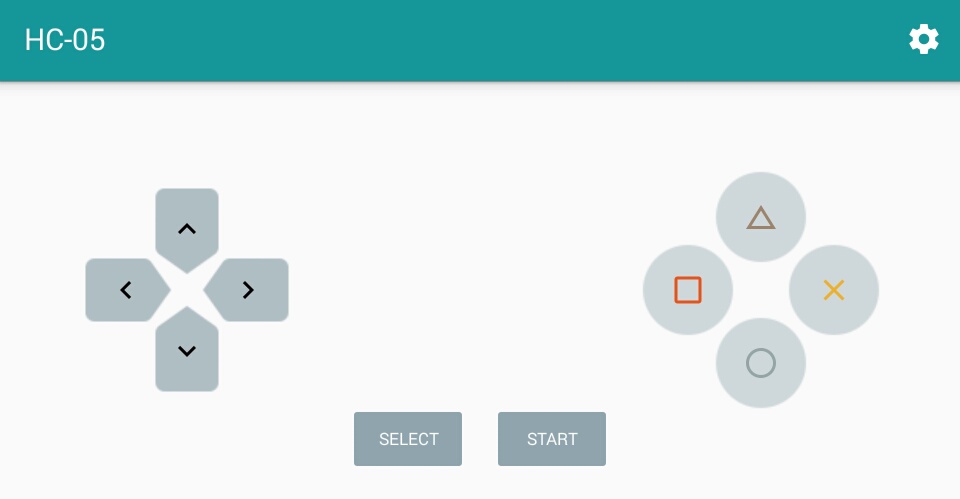
4. Opt for "Controller Mode".
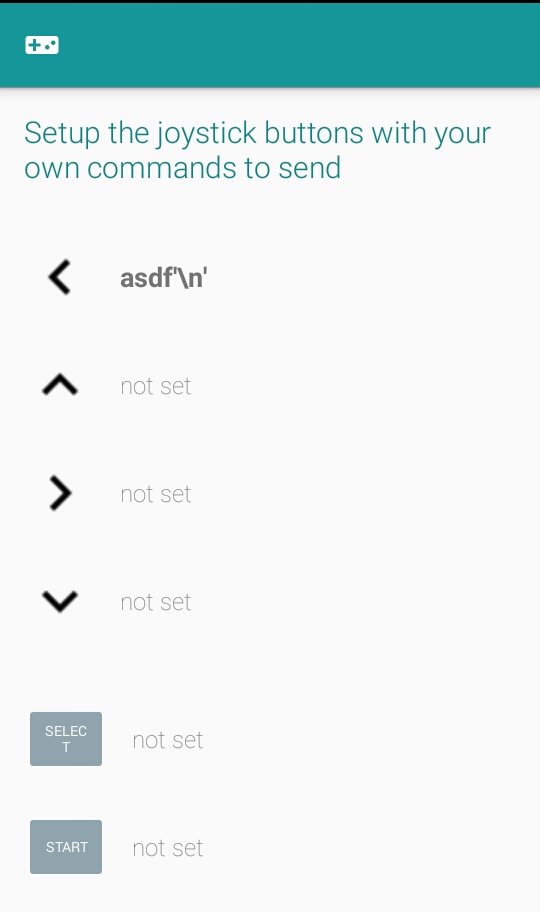
5. Click on the settings icon on the top right of the app layout.
6. set up any four buttons with "a", "b", "c", and "d".
7. Once done, you should be able to control the bot.
Sorce Code
The source code is written in Arduino IDE.
The source code can be obtained from the GitHub, Click here